Download
1 / 30
360 likes | 1.25k Views
SCARA – Forward Kinematics. Use the DH Algorithm to assign the frames and kinematic parameters. 3. 2. 4-Tool Roll. 1. Number the joints 1 to n starting with the base and ending with the tool yaw, pitch and roll in that order. Note: There is no tool pitch or yaw in this case. k=0. z 0.

E N D
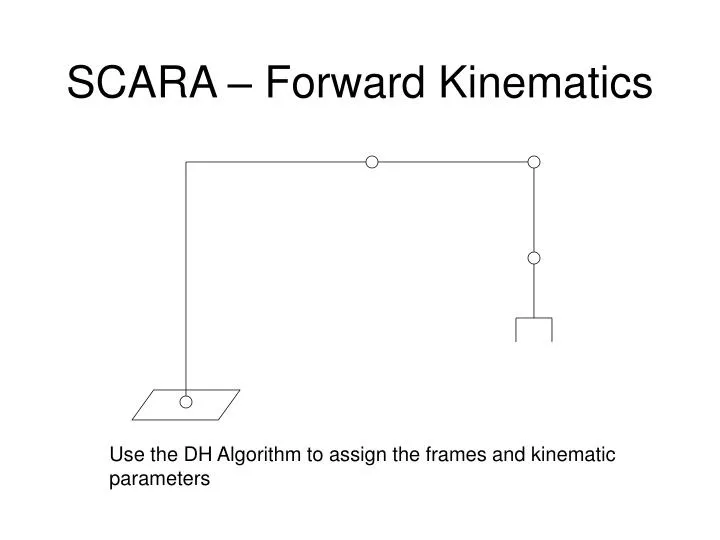
SCARA – Forward Kinematics Use the DH Algorithm to assign the frames and kinematic parameters
3 2 4-Tool Roll 1 Number the joints 1 to n starting with the base and ending with the tool yaw, pitch and roll in that order. Note: There is no tool pitch or yaw in this case
k=0 z0 y0 x0 Assign a right-handed orthonormal frame L0 to the robot base, making sure that z0 aligns with the axis of joint. Set k=1
k=1 2 Common Normal z1 z0 y0 x0 Align zk with the axis of joint k+1. Locate the origin of Lk at the intersection of the zk and zk-1axes If they do not intersect use the the intersection of zk with a common normal between zk and zk-1.(can point up or down in this case)
k=1 x1 y1 z1 z0 y0 x0 Select xk to be orthogonal to both zk and zk-1. If zk and zk-1are parallel, point xk away from zk-1. Select yk to form a right handed orthonormal co-ordinate frame Lk
k=2 Vertical Extension Common Normal x1 y1 z1 z2 z0 y0 x0 Align zk with the axis of joint k+1. Again zk and zk-1 are parallel the so we use the intersection of zk with a common normal.
k=2 x2 x1 y1 y2 z1 z2 z0 y0 x0 Select xk to be orthogonal to both zk and zk-1. Once again zk and zk-1are parallel, point xk away from zk-1. Select yk to complete the right handed orthonormal co-ordinate frame
k=3 x2 x1 y1 y2 z2 z1 4 z3 z0 y0 x0 Align zk with the axis of joint k+1. Locate the origin of Lk at the intersection of the zk and zk-1axes
k=3 x2 x1 y1 y2 z2 z1 x3 y3 z3 z0 y0 x0 Select xk to be orthogonal to both zk and zk-1. Again xk can point in either direction. It is chosen to point in the same direction as xk-1 Select yk to complete the right handed orthonormal co-ordinate frame
k=4 x2 x1 y1 y2 z2 z1 x3 y3 z3 y4 z0 y0 z4 x4 x0 Set the origin of Ln at the tool tip. Align zn with the approach vector of the tool. Align yn with the sliding vector of the tool. Align zn with the normal vector of the tool.
x2 x1 y1 y2 z2 z1 x3 y3 z3 y4 z0 y0 x4 z4 x0 With the frames assigned the kinematic parameters can be determined.
k=4 x2 x1 y1 y2 z2 z1 x3 y3 z3 y4 b4 z0 y0 x4 z4 x0 Locate point bk at the intersection of the xk and zk-1 axes. If they do not intersect, use the intersection of xk with a common normal between xk and zk-1
k=4 x2 x1 y1 y2 z2 z1 4 x3 y3 z3 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from xk-1 to xk measured about zk-1 It can be seen here that the angle of rotation from xk-1 to xk about zk-1 is 90 degrees (clockwise +ve) i.e. 4 = 90º But this is only for the soft home position, 4 is the joint variable.
k=1 x2 x1 y1 y2 z2 z1 4 x3 y3 z3 d4 y4 b4 z0 y0 x4 z4 x0 Compute dk as the distance from the origin of frame Lk-1to point bk along zk-1 Compute ak as the distance from point bk to the origin of frame Lk along xk In this case these are the same point therefore a4=0
k=4 x2 x1 y1 y2 z2 z1 4 x3 y3 z3 d4 y4 b4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from zk-1 to zk measured about xk It can be seen here that the angle of rotation from z3 to z4 about x4 is zero i.e. 4 = 0º
k=3 x2 x1 y1 y2 z2 z1 4 x3 b3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Locate point bk at the intersection of the xk and zk-1 axes. If they do not intersect, use the intersection of xk with a common normal between xk and zk-1
k=3 x2 x1 y1 y2 z2 z1 4 x3 b3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from xk-1 to xk measured about zk-1 It can be seen here that the angle of rotation from xk-1 to xk about zk-1 is zero i.e. 3 = 0º
k=3 x2 x1 y1 y2 z2 z1 d3 4 x3 b3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute dk as the distance from the origin of frame Lk-1to point bk along zk-1 Since joint 3 is prismatic d3 is the joint variable Compute ak as the distance from point bk to the origin of frame Lk along xk In this case these are the same point, therefore ak=0
k=3 x2 x1 y1 y2 z2 z1 d3 4 x3 b3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from zk-1 to zk measured about xk It can be seen here that the angle of rotation from z2 to z3 about x3 is zero i.e. 3 = 0º
k=2 b2 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Once again locate point bk at the intersection of the xk and zk-1 axes If they did not intersect we would use the intersection of xk with a common normal between xk and zk-1
k=2 2 b2 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from xk-1 to xk measured about zk-1 It can be seen here that the angle of rotation from x1 to x2 about z1 is zero i.e. 2 = 0º But this is only for the soft home position, 4 is the joint variable.
k=2 a2 2 b2 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute dk as the distance from the origin of frame Lk-1to point bk along zk-1 In this case these are the same point therefore d2=0 Compute ak as the distance from point bk to the origin of frame Lk along xk
k=2 a2 2 b2 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from zk-1 to zk measured about xk It can be seen here that the angle of rotation from z1 to z2 about x2 is zero i.e. 2 = 0º
k=1 a2 2 b1 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 z3 d4 y4 z0 y0 x4 z4 x0 For the final time locate point bk at the intersection of the xk and zk-1 axes
k=1 a2 bk 2 x2 x1 y1 y2 z2 z1 d3 4 x3 y3 1 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from xk-1 to xk measured about zk-1 It can be seen here that the angle of rotation from x0 to x1 about z0 is zero i.e. 1 = 0º But this is only for the soft home position, 1is the joint variable.
k=1 a1 a2 b1 2 x2 x1 y1 y2 z2 z1 d3 4 x3 d1 y3 1 z3 d4 y4 z0 y0 x4 z4 x0 Compute dk as the distance from the origin of frame Lk-1to point bk along zk-1 Compute ak as the distance from point bk to the origin of frame Lk along xk
k=1 a1 a2 b1 2 x2 x1 y1 y2 z2 z1 d3 4 x3 d1 y3 1 z3 d4 y4 z0 y0 x4 z4 x0 Compute k as the angle of rotation from zk-1 to zk measured about xk-1 It can be seen here that the angle of rotation from z0 to z1 about x1 is 180 degrees
a1 a2 2 x2 x1 y1 y2 z2 z1 d3 4 x3 d1 y3 1 z3 d4 y4 z0 y0 x4 z4 x0 From this drawing of D-H parameters can be compiled
Joint d a Home q 1 1 d1 a1 180º 0º 2 2 0 a2 0º 0º 3 0º d3 0 0º dmax 4 4 d4 0 0º 90º a1 a2 2 x2 x1 y1 y2 z2 z1 d3 4 x3 d1 y3 1 z3 d4 y4 z0 y0 x4 z4 x0
Joint d a Home q 1 2 3 4