Download

1 / 14
140 likes | 245 Views
Energy Model and Measurement for DC Motors in PPRK. Yongguo Mei Sep. 18, 2003. Outline. PPPK Energy model Experiment design Future work. PPRK. Palm Pilot Robot Kit Cheap, easy to build, and fun Created by two Carnegie Mellon Robotics Institute research groups

E N D
Energy Model and Measurement for DC Motors in PPRK Yongguo Mei Sep. 18, 2003
Outline • PPPK • Energy model • Experiment design • Future work
PPRK • Palm Pilot Robot Kit • Cheap, easy to build, and fun • Created by two Carnegie Mellon Robotics Institute research groups • Desktop Robotics, fully autonomous robot controlled by a Palm handheld computer • Open resource available from their website
PPPK (continued) • Central control Unit: BrainStem, General Purpose Module • 3 MX-400 Servo Motors, driving three wheels • 3 GP2D12 infrared sensors • Connect to PDA through RS-232
Power source and consumers • Source: Hobbico HydriMax 6.0V Battery, or 4 regular AA alkaline batteries, precious • Consumers: GP module, sensors, DC motors • Not consider PDA here • Concentrated on the speed control of motors to save energy
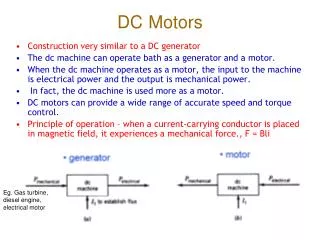
Circuit Model • V = iR + Ldi/dt + Vemf • T = Kti • Vemf= Ktω • T– torque • ω– angular velocity • Kt – torque constant • P=V*i • Convenient, but enough?
Other factors • Saturation caused by high current • Non-linear commutation effect • Eddy current losses • Frictions • No general accepted model • How do we handle all of these?
From another direction • Real measurement to get the energy model for our Robot? • Few people did this before • Avoid the complicated theoretical analysis • A viable way for our problem
Possible format • For specific Motors and working environment, Power is a function of the velocity and acceleration • What are possible formats? • Polynomials with highest exponent 2 • P(v,a) = c(1)v*v+c(2)v*a+c(3)a*a+c(4)v+c(5)a+c(6)
Possible format • Second-degree polynomial is enough • It can incorporate most of the factors mentioned previously • Compare this with other models • Can this model be extended to other Robots?
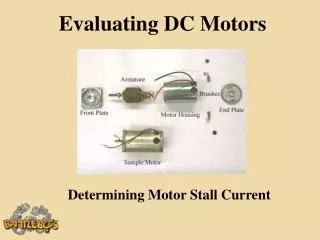
Experiment design • MX-400 Pro Servo motor • Three lines: ground, power and control • Measure voltage and current by Data Acquisition, DAQ • Program by Labview to process the data
Experiment Design • Accerelation, constant speed and Deceleration • Rotation • Speed control by c program, hope not too difficult!
Future work • Real measurement • Energy optimal control • Motion planning • Multimover problems