Download
1 / 3
30 likes | 184 Views
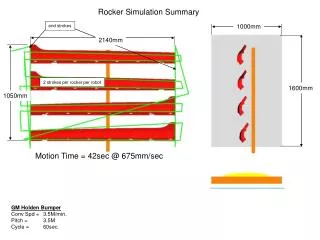
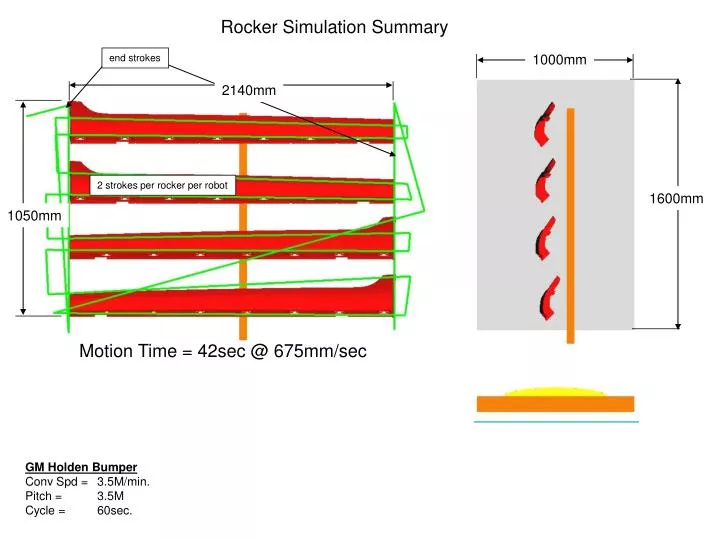
Rocker Simulation Summary. 1000mm. end strokes. 2140mm. 2 strokes per rocker per robot. 1600mm. 1050mm. Motion Time = 42sec @ 675mm/sec. GM Holden Bumper Conv Spd = 3.5M/min. Pitch = 3.5M Cycle = 60sec. Existing Plant System Layout. AP Base Clear. coat 1 backup.

E N D
Rocker Simulation Summary 1000mm end strokes 2140mm 2 strokes per rocker per robot 1600mm 1050mm Motion Time = 42sec @ 675mm/sec GM Holden Bumper Conv Spd = 3.5M/min. Pitch = 3.5M Cycle = 60sec.
Existing Plant System Layout AP Base Clear coat 1 backup coat 1 coat 1 coat 1 coat 2 backup GM Holden Bumper Conv Spd = 3.5M/min. Pitch = 3.5M Cycle = 60sec.