Download
1 / 10
100 likes | 219 Views
Lecture IV. Example 1. Classification by means of Total Fuzzy Similarities. Example 2. Highway driving fluency. Example 3. Determining Athlete’s Aerobic and Anaerobic Thresholds. 100 metres sprinter has to run a short distance very fact, therefore, he has to have much

E N D
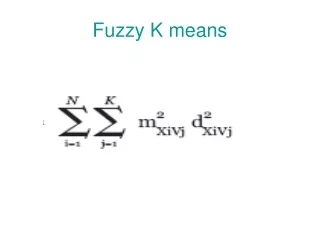
Lecture IV Example 1. Classification by means of Total Fuzzy Similarities Example 2. Highway driving fluency
Example 3. Determining Athlete’s Aerobic and Anaerobic Thresholds 100 metres sprinter has to run a short distance very fact, therefore, he has to have much training in the anaerobic zone (where his pulse close to maximal value), while a long distance runner needs endurance, thus, he needs training in the aerobic zone. It is important for an athlete to test his aerobic and anaerobic thresholds regularly, these tests can be done e.g. on a running track ergometer [see Picture 1]. Aerobic and anaerobic thresholds are functions of blood lactate [mmol/l], ventilation; CO2[l/min] and O2 uptake [%]. They, in turn, are functions of heartbeat [b/min]. A typical test starts with a 3 minutes worm up [pulse around 100 beat/min], then the load is increased every 2 - 3 minutes and blood lactate, ventilation, CO2, O2 uptake and heartbeat are measured. A test lasts until volitional exhaustion [pulse near 200 b/min], this takes usually 20-30 minutes [A typical test protocol, see Picture 2].
Clearly, all these consepts are fuzzy and can be expressed by fuzzy intervals. They are context dependent, too. For example ’Maximal pulse – 40’ depends on a respective measurement. We used the following membership function To mimic a skilled sport medicine spacialist’s action when she/he is determing an aerobic threshold, we need only one rule (namely that one given above!) Indeed, we count the degree of total fuzzy similarity between each measured value and that given be the rule. Examples: open Matlab7 >> cd C:\Matlab7\Mika\hemi >> aek Samples 33, 78
Example 4. Signalized isolated pedestrian crossing (See Picture 3.) As long as there are no pedestrians, vehicles havegreen signal. If a pedestrian pushes a button and no cars are approaching the pedestrian will have immediately green signal. In case there are vehicles approaching and pedestrians waiting, then vehicles’s green depends on the following factors: * how long time have pedestrians been waiting for [a short/long/too long time] * how many vehicles are approaching [few/some/many] * what is the shortes cap between approaching vehicles [short/large] The situation is updated after every half second. Experienced traffic engineers described the above fuzzy set as follows (See Picture 2). There are 18 rules in our fuzzy IF-THEN rule base (green extension is prefered) This corresponds to all possible rules (3x3x2 = 18), therefore, the rule base is complete. An example of a rule (given by traffic engineers): IF (pedestrians’ waiting time = short) [weight = 1] AND (approaching vehicles = few) [weight = 2] AND (gab between approaching vehicles = short) [weight = 1] THEN (extend vehicles green signal) The output is always a crisp action (red or green). In a ’50-50 situation’ it is green.
An example (assuming we would have only three rules) 1 1 1 3/8 short some ½ ½ short 3 12 16 1 2 3 4 5 1 2 3 5 24 28 [sec] [] [sec] 0 1 1 1 3/4 long large 9/16 ½ ½ some 3 12 16 1 2 3 4 5 1 2 3 5 24 28 [sec] [] [sec] 1 1 1 many too long short 16/40 ½ ½ 3 12 16 1 2 3 4 5 1 2 3 5 0.1 24 28 [sec] [] [sec] Pedestrians’ waiting time = 14 sec Vehicles = 4 Gab between = 2 sec The actual traffic situation is most similar to the 2. rule, thus...
Example 5. More complicated traffic signal control (See....) Traffic flow on the main street (phase A) is from two to ten times more intensive than traffic flow from the other direction. Normally the phase order is A-B-C-A…, however, if there are very few or no vehicles in the next phase B or C, then these phases can be skipped. Thus, the order can be e.g. A-C-A-B-C or A-B-A-B-C. Thus, the first task is to determine the right phase order. Here the IF-THEN rules have a form IF V(B) is medium AND V(C) is over saturated THEN phase is C Corresponding to Step 3 of the Algorithm, if the maximal total similarity is not unique, the phase with the longest waiting time will be fired. The second task is to control A’s green ending, that is, the decision of the moment when the green of the first signal group of phase A can be terminated, so that the first signal group of phase B or C can be started. These rules are of the following form IF A is a Few AND Queue is Medium THEN Extension is Short A Similarity Model and a Mamdani style fuzzy model was constructed at H.U.T, Lab of Traffic and Transportation. The results were compared…
These fuzzy models ware tested by a traffic simulator ‘HUTSIM’ and the results were as follows:
Example 6. Real-Time Reservoir Operation * Lake Päijänne is located in the Southern part of Finland. * It’s water runs to the Golf of Finland via River Kymijoki. * Each year Päijänne is frozen at least 5 months and lots of snow is accumulated. * In spring floods caused by melting snow would be typical if Päijänne was not regulated. * The water reference level is a function of date given by law. * Based e.g. on ‘snow water equivalent’, human experts are able to regulate several dams such that water level. can be kept close to the reference level * The task was to create a formal control system to do the same job.
A control system was created at Helsinki University of Technology, Laboratory of Water Resource Management by Tanja Dudrovin. The model consists of two real-time submodels; the first submodel sets up a reference water level (WREF) for each time step. Given this reference level, the observed water level (W), and the observed inflow (I), the second submodel makes the decision on how much water should be released from the reservoir during the next time step. For the snowmelt season, WREF value is dependent on the snow water equivalent (SWE) and can be inferred for each time step with the rules: IF SWE is smaller than average/average/larger than average/much larger than average THEN WREF is high/middle/low/very low. In the second sub model, the rules have a form IF W is very low/low/objective/high/very high AND I is very small/small/large/very large THEN release is exceptionally small/very small/small/quite small/quite large/large/very large/exceptionally large. [Membership functions see Picture 4].
To calibrate the corresponding fuzzy set, a data of real control actions collected during 1975-1985 was used. RESULTS The model was tested using data from the years 1985-1996. The Sugeno method was chosen for comparison against the Total Fuzzy Similarity. With both methods the system was kept the same as much as possible. To apply the Sugeno method the, defuzzification was performed using a weighted average. The performances of the two methods were almost indistinguishable. With the Total Fuzzy Similarity the water level targets during the summer were sometimes better fulfilled, but the release tended to fluctuate more, and the limitation on change in release was more relevant. The model performance was generally good, but the model did not capture expert thinking in the most exceptional circumstances. (- later the model was completed by an extra subsystem to do the job.)