Download
1 / 55
550 likes | 689 Views
输入. 输出. 装置. 第二章 测试装置的基本特性. 测试系统 是执行测试任务的传感器、仪器和设备的总称。. 时域: x(t) h(t) y(t) 传输特性: h(t) 复数域: X(s) H(s) Y(s) H(s) 频域 : X(w) H(w) Y(w) H(w). 复杂测试系统 ( 轴承缺陷检测 ). 简单测试系统. V. 第一节 概 述

E N D
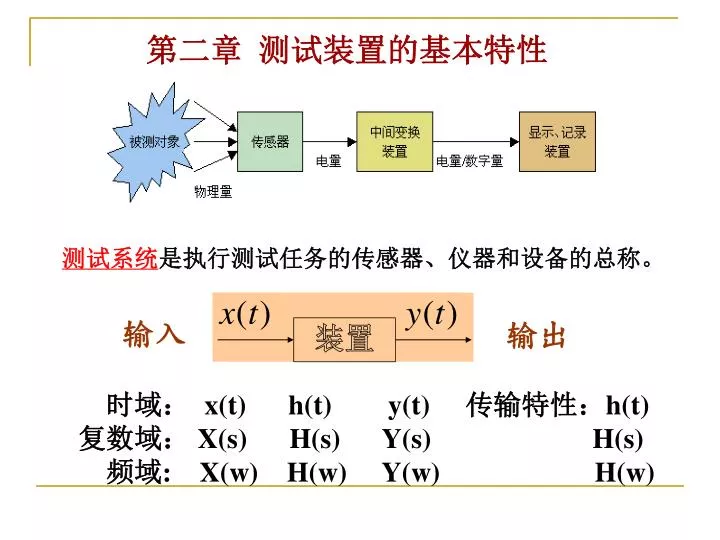
输入 输出 装置 第二章 测试装置的基本特性 测试系统是执行测试任务的传感器、仪器和设备的总称。 时域: x(t) h(t) y(t) 传输特性:h(t) 复数域: X(s) H(s) Y(s) H(s) 频域: X(w) H(w) Y(w) H(w)
复杂测试系统(轴承缺陷检测) 简单测试系统 V 第一节 概 述 测试装置:可能是复杂的测试装置,也可能是组成环节 一、对测试装置的基本要求
⑴ 已知: • ⑵ 已知: • ⑶ 已知: 理想的测试装置:单值的,确定的输入、输出关系 且: 输出/输入=常值线性关系 二、线性系统及其主要性质 线性系统:输入:x(t) 输出:y(t)
特点:①无交叉项,无高次幂,无常数项; 判断:y=ax+b ②n:阶数 时,系统稳定 ③ 为常数, 时不变线 (定常)性系统 二、线性系统及其主要性质 ⑴ 叠加性
⑵ 比例性 ⑶ 微分 ⑷ 积分:初始状态为零:t=0时, ⑸ 频率保持性:输入为某一频率的信号 输出必为同一频率的信号
第二节 测试装置的静态特性 • 静态测量:测量期间被测值认为是恒定的 • 动态测量: • 测量装置的特性:静态特性:指标 动态特性: 一、线性度: 测量装置输出、输入之间 保持常比例关系的程度 线性度=
拟合直线的确定: 端基直线 独立直线:最小二乘法 最小
主要静态特性: 二、灵敏度 当测试装置的输入x有一增量△x,引起输出y发生相应的变化△y时,则定义: 理想的定常线性系统: 常数 S: ①以拟合直线的斜率作为装置的灵敏度 ②有量纲 eg:弹簧 mm/kg or 300mv/mm X=0.01mm,y=10mm 则 S=10/0.01=1000 此时S为“放大倍数”
三、回程误差 四、稳定度、漂移: 保持特性不变的能力 是指在一定工作条件下,当输入量不变时, 输出量随时间变化的程度。
第三节 测试装置动态特性的数学描述 一、传递函数 初始条件为零时: 传递函数:
H(s)的几个特点: ⑴ H(s)只表达系统的传输特性 与x(t)及系统的初始状态无关 ⑵ H(s)不拘泥于系统的物理结构, 只反映系统的传输特性 ⑶ H(s)反映x(t),y(t)量纲变换关系 ⑷ 稳定系统: 二、频率响应函数H(w) [稳定] (一)求法: 以 代入 H(s)
频率响应函数: H(w)= P(w)+jQ(w) H(jw) ,H(w) 稳定输出信号和输入信号的幅值比。 稳态输出信号对输入信号的相角差。
的物理意义: 表征系统对输入信号中各个频率分量的幅值的缩放能力和对相位角前后移动的能力。 注意:H(w): 信号输入与稳态输出的关系。 H(s): 稳态 + 瞬态。 (二)、幅、相频特性及图像描述 1、H(w) :A(w)—w 幅频特性 相频特性 2、H(w)= P(w)+ jQ(w) P(w)—w 实频特性 Q(w)—w 虚频特性
LT FT h(t) H(s) H(w) h(t) ILT IFT y(t) x(t) h(t) 伯德图 奈魁斯特图 (三) 脉冲响应函数 当 求:y(t)=?X(s) H(s) Y(s) X(s)=1 Y(s)=X(s)H(s)=H(s) h(t):装置的传输特性在时域中的描述。 h(t): 脉动响应函数 时域 H(w):频率响应函数 频域 H(s):传递函数 复数域
X(s) Z(s) Y(s) H1(s) H2(s) (四)环节的串、并联 前提:环节之间没有能量的交换 串联:
H(s) Y1(s) H1(s) x(s) Y(s) H2(s) Y2(s) 并联: 数学表明:任何高阶系统(n>3)都可看成是 若干个一、二阶环节的串、并联 。
五、一阶、二阶系统的特性 (一)一阶系统 时间常数 令RC=
⑴ 当 (误差不超过2%) (2)当 系统相当于一个积分器 一阶系统适:测缓变或低频的被测量
(3)时间常数 : 决定了此装置的适用频率范围 一阶装置的脉冲响应函数: ,
典型系统的动态响应 1 一阶系统
例1:用一个时间常数为0.3s的一阶装置去测量周期为1s的正弦信号,问幅值误差将是多少?若周期为5s呢?结果如何?例1:用一个时间常数为0.3s的一阶装置去测量周期为1s的正弦信号,问幅值误差将是多少?若周期为5s呢?结果如何? • 解:幅值误差: • 一阶系统: • 当装置的周期为1s,5s时:
通过 例2. 求周期信号 的装置后所得到的稳定响应? 传递函数为 解:x(t)由两股信号组成 信号通过 的装置
幅频特性: 相频特性: 其对两股信号分量的幅值增益及相移分别为:
(二)二阶系统 动圈式电表 x(t):电流 y(t):角位移 J: 转动惯量 G: 游丝的扭转刚度 C:阻尼系数:空气、电磁、油 Ki: 电磁转矩系数: 有效面积、 匝数、磁感应强度。
令: 固有频率 阻尼比 灵敏度 令:S=1
幅频特性:A(w)-w 相频特性 二阶系统的特点 ⑴ 当w<< ⑵动态特性参数: 时,共振。 共振的利用:测参数:
二阶系统的特点 ⑴ 当w<< ⑵动态特性参数: 时,共振。 共振的利用:测参数:
⑶ 时, 很小 时, 反相, 处, ⑷ 恰当选择参数: 及 一般: (0.6~0.8) 目的:获得较小的误差及较宽的工作频率范围
x(t) y(t) h(t) 第四节 测试装置对任意输入的响应 一、系统对任意输入的响应 X(s) H(s) Y(s) X(w) H(w) Y(w) 即:系统的输出就是输入与系统的脉冲响应函数的卷积
t<0 0 x(t) t>0 1 二、系统对单位阶跃输入的响应 阶跃: 一阶系统 ① 时,y(t)=0.632 测τ ② 一阶装置: 愈好 二阶系统:
① 响应快; :影响振荡次数 ② 选择范围:0.6~0.8 偏离稳态不到2%-5%的范围内
第五节 实现不失真测试的条件 :常数 表明:输出波形与输入波形精确一致,只是幅值放大了 倍,时间上延迟了 波形不失真条件: 常数 线性
常数 所引起的失真 幅值失真: 相位失真: 与w不成线性关系引起的失真 问题:单一频率的信号进入线性定常系统,是否会产生失真 装置 一阶: 响应 满足不失真条件的通频带边宽 二阶:
例:一力传感器具有二阶动态特性,传递函数 已知传感器的固有频率 试问: 阻尼比 用它测量频率分别为600Hz和400Hz 的正弦交变力时,相对幅值误差和相位差? 解:该传感器的频率特性为:
当测量 的交变力时 相位差: 的交变力时 当测量
相位差: 时, 可见: 对于
幅值情况: 存在幅值误差 相位情况:时间滞后: 可认为无相位失真
(稳态正弦法) 频率响应法 动态测试 阶跃响应法 第六节 测试装置动态特性的测试 二阶: 一阶: 一、频率响应法:(频域中测: ) (一)方法 ①、对装置施加正弦激励 ②、稳态后,测 ,相角差 得此频率下 逐点增加到较高频率,直到输出量减少到初始输出幅值得一半,得:
(二)动态特性参数的确定: 定 一阶装置: 由式
二阶装置 相频曲线: 处, 此点斜率反映了阻尼比 测试较困难 很小 前提 幅频曲线估计 幅频特性估计
①、由 ②、由 二、阶跃响应法(时域中测 ) (一)、一阶装置: ①、由y(t)=0.632时t 但可靠性差 ② 、 成线性
