Download
1 / 22
300 likes | 1.12k Views
Using Torque-Ripple-Induced Vibration to Determine the Initial Rotor Position of a Permanent Magnet Synchronous Machine. Phil Beccue, Steve Pekarek Purdue University November 6, 2006. Outline. Background information

E N D
Using Torque-Ripple-Induced Vibration to Determine the Initial Rotor Position of a Permanent Magnet Synchronous Machine Phil Beccue, Steve Pekarek Purdue University November 6, 2006
Outline • Background information • Source of torque ripple in a surface mounted Permanent Magnet Synchronous Machine (PMSM) • Method for measuring torque ripple • Algorithm used to mitigate torque ripple • Utilizing Torque Ripple to Determine Rotor Position
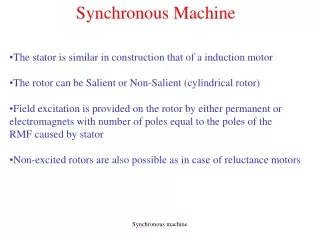
PM Sychronous Machine Back-EMF equations Torque equation Current equations The harmonic content of the currents and back-EMF can be expanded as a Fourier series
Torque Produced by PMSM Torque is modeled as sum of the average torque and the torque ripple harmonics Torque Average Torque Harmonics
A polyvinylidene fluoride (PVDF) film produces voltage in response to deformation The PVDF film is metallized on both sides The film acts as a dialectic – forms a capacitance Modeled by a voltage source with a series capacitor Cs Vs Sensing Torque Ripple
Torque Ripple SensorIsolating Torque Ripple Harmonics • Values for harmonics of torque are acquired by multiplying the sensor voltage by cos(yθr) and sin(yθr) • The result of the multiplication is then passed through a lowpass filter
Closed-Loop Controller Cost function is defined to be a function of measured quantities (in steady state) Expression for measured torque ripple is expanded
Closed-Loop Controller The desired current harmonics are then chosen as a function of the measured torque ripple
Diagram of torque ripple mitigation control-loop Closed-Loop Controller Gain Measured Currents PMSM Machine Hysteresis Current Controller Hall-Effect Sensors Position Observer
Initial Position Estimator Only two stator phases are energized Produces a torque harmonic, but zero average component
Initial Position Estimator Three commanded stator currents Produces three torque ripple amplitudes at the commanded electrical frequency
Initial Position Estimator The ratio of two vibration waveforms provides position information Substituting in fundamental component of influence of flux on the stator winding from the permanent magnet
Initial Position Estimator Using trig identities to simplify Closed form expression for the tangent of the position observer
Test motor is a 2.5 kW, 16 Amp 8-pole surface mount PMSM with non-sinusoidal back-emf A 4096 counts per revolution encoder used to obtain an accurate rotor position Commanded stator current had a frequency of 1000 Hz and a peak amplitude of 1 A (6.25% of rated) The response time was less than 50 ms Experimental Verification The control was tested in hardware using the following setup
Initial Position Estimator Calculated rotor position Rotor position error
Measured Start-up Performance Start-up performance comparison of position observer to an optical encoder
Torque Ripple Mitigation Implementation Simulated steady-state results before and after torque ripple mitigation algorithm
Torque Ripple Mitigation Implementation Measured steady-state results before and after torque ripple mitigation algorithm
Torque Ripple Mitigation Implementation Steady-State FFT of Electromagnetic Torque
Measured Transient Response Measured torque ripple and current during step change in commanded torque from 1.25 Nm to 5.0 Nm
Conclusions • Initial position observer is developed that utilizes torque ripple measurement to determine position • Requires no knowledge of machine parameters • Applicable to surfarce or buried-magnet machines • Relatively straightforward to implement • Initial position observer can potentially enable sensorless operation over the full speed range of the motor • Torque ripple mitigation can be achieved without in-line position encoder