Download
1 / 47
500 likes | 777 Views
ACMSIGGRAPH 2006. Vector Field Based Shape Deformations . Wolfram von Funck / Holger Theisel / Hans-Peter Seidel MPI Informatik. Computer Graphics Lab. SoHyeon Jeong 2007/04/16. Contents. Introduction Constructing the vector field Modeling metaphors Implementational Details

E N D
ACMSIGGRAPH 2006 Vector Field Based Shape Deformations Wolfram von Funck / Holger Theisel / Hans-Peter Seidel MPI Informatik Computer Graphics Lab. SoHyeon Jeong 2007/04/16
Contents • Introduction • Constructing the vector field • Modeling metaphors • Implementational Details • Evalutation and Comparison
Shape Deformation Original shape New Deformed shape Transformation with Constraints • Performance • Detail & Feature preservation • Volume preservation • Avoidance of self-intersections • Deformation metapor
Deformation Metaphors • Free movement of certain handles • Singh and Fiume 1998 • Bendels and Klein 2003 • Pauly et al. 2003 • 9-dof object • Botsch and Kobbelt 2004 • Two Handed metaphor • Llamas et al. 2003 • New Metaphor • Implicit tools ?
Modeling Metaphors: Implicit Tools • Idea • Use simple implicit objects as deformation tools
Deformation Approaches • Mapping problem • Finding a mapping transformation between the original and the new deformed shape • Finding path problem • Finding continous path that certain point should follow
Finding Paths Problem • Integration of vector field at time T • Similar to “flow of fluid” [Foster and Fedkiw 2001] scaling Translation Rotation
The Main Idea to Solve • Constructing vector fields that produce useful deformation • Computing deformation by integrating using vector fields • Flexible • Variety of different deformations • Translations & rotations • Simple • Fast computation • Interactivity & large mesh deformation
Properties of Vector Fields • Divergence-free • C1 continuity • Time-dependent path integration • Volume preservation[Davis 1967] • Smooth deformation • No self-interaction[Theisel et al. 2005] Simple local properties of vector Global and local properties of shape deformation
Piecewise Region Field • Inner region • Well-defined region • Outer region • No deformation • Intermediate region • Blending between Inner & Outer region • Divergence-free • C1continuity
Piecewise Region Field • Region Field : • Inner region • Intermediate region • Outer region
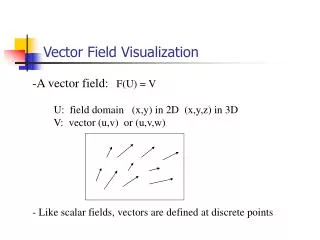
Terms Scalar field Gradient Co-gradient Divergence 2D 3D
Constructing the Deformation Vector Field V • Constructing a divergence-free vector field • 2D • Co-gradient field of a scalar field [Davis 1967] : • 3D • Cross product of gradients of two scalar fields
Constructing the Deformation Vector Field V (3D) • Define scalar field in terms of region field • Construct divergence-free field using defined scalar fields : Berstein polynomials
Blending intermediate region • Inner & outer region should be connected smoothly • It requires C1continuity • Scalar fields : C2 continuity Vector field : C1continuity e(x) 0
1 1 1 1 1 0 0 0 0 0 -1 -1 -1 -1 -1 Blending: 2D Example outer region v = 0 intermediate region inner region v constant
2D Example • Region Field
Special Deformations - Translation • Translation vector field : A constant vector field • The center point c : to determine DOF : The center point
Special Deformation - Rotation • Rotation vector field : linear vector field v and r • A center point : • An Axis : • Ristrected as a cylinder
Vector Field • Translation • Rotation
Deformation Cycle • Usually • r(x) : the distance to a certain point • c : the center of the inner region • u, w, a : determined by interactive input device(mouse) • Integration • If tool moves , the integration inside the inner region moves the points by • The step size of the path line integration is chosen so that the path line follows the path of the tool Define region field r(x) with ri, ro and c Define scalar field e(x), f(x)with orthogonal vector u, w, a center c and an axis a Update v Integrate point of the shape with v
Implicit Tools • Point tools • Points in the inner regionat the beginning followthe movement of the tool • Other points never enter the inner region no self-intersection • Line tools
Deformation Paint • The tool is moved along a path on the surface • : the location of the point on the shape at a certain time • , = choosen interactively
Moving Point Sets • Multiple isolated point set the shape • : Smooth approximated distance function to this point set • , : interactively choosen • : Barycenter of all points
Collision Tools • An arbitrary closed tool shape for which a repeated collistion detection with the deformed shape • Find collision region using Bounding box hierarchy • Setting • Collision detected points : • r = smooth approximated distance function along with ri = 0 • Inner region is constant • It follows the path of the input device
Twisting & Bending • Linear and quadratic vector field • Twsiting • : linear • : direction of the twisting axis • : on the twising axis
Twisting & Bending • Bending • Using a rotation • ,
Twisting & Bending twisting bending
Feature Preservation • Details on the surface are preserved during deformation
Integration with adaptive stepsize • Best tradeoff between speed and accuracy [Nielson et al. 1997] • 4th order Runge-Kutta integration with adaptive stepsize
Remeshing • Large deformation causes unpleasing artifacts • Undersample • Volume changing • Idea • Remeshing both the original and deformed object • New vertices undergo same deformation as the original vertices It Requires remeshing
Remeshing M : original mesh, M’ : deformed mesh, P : deformation path • M and P are stored • All edges of the M’ are tested for refinement • length(edge) > threshold • Angle between the normals of the end-vertices is large Edge split on both M and M’ • New vertices of M are deformed using P • Diffusion of the vertices • Guarantee a uniform distribution of the vertices • Vertices moves to the barycenter of its 1-ring • Vertex is projected back onto the surface of the undiffused mesh • Repeated a fixed number of steps • Decimation step • length(edge) < threshold • Small angle • Perform step 3 again for collapsed points collapsed
Visual Quality • The twisting of a box [Proposed] [Yu et al 2004] [Lipman et al. 2005] [Zhou et al. 2005]
Visual Quality • Bending a sylinder [Laplacian surface] [Poisson Mesh] [Proposed] [Zhou et al. 2005] [Botsch and Kobbelt 2004]
Speed • Factors • Vertex # in inner, intermediate region • Vertex # in intermediate effects more than vertex # of inner region • Modeling metaphor • Region field r • Simple r gives a higher performance • Collision detection step in shape stamping • Deformation is highly parallelizable using GPU • 4th order Runge-Kutta path line integration of points • Read-back of the computed points drops performces • But still 10 times faster than CPU
Speed • Implementation Environment • AMD Opteron 152(2.6 GHz) • 2GB RAM • GeForce 6800 GT GPU
Accuracy • Accuracy in volume • Discrete surface points produces slight changes of the vlume • But is tolerable
Conclusion • Alternative approach to shape deformation • Time-dependent divergence-free vector field • volume-preserving • Self-intersection • Sharp features • Realtime deformation • Accuracy in volume preserving is high
Future Work • Preformance can futher be increased • Multi-processor parallelization of the integration • Integration of vertices is carried out independently • Applcation to point-based shape representation • Does not rely on any connectivity information of the mesh • Modeling metaphor can be extended • Full and zero deformation can be marked explicitly on the surfaces