Download
1 / 30
300 likes | 452 Views
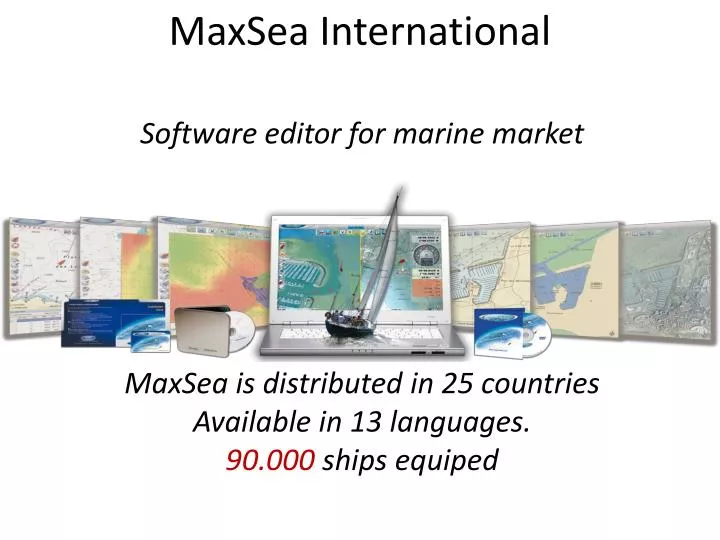
MaxSea International. Software editor for marine market MaxSea is distributed in 25 countries Available in 13 languages . 90.000 ships equiped. Our group. 75 Employes Turnover 2012: 6.2 M€ (+10%). Charts Bidart - France. Software Bidart - France. Holding Bidart - France.

E N D
MaxSea International Software editor for marine market MaxSeaisdistributed in 25 countries Available in 13 languages. 90.000shipsequiped
Our group 75 Employes Turnover 2012: 6.2 M€ (+10%) Charts Bidart - France Software Bidart - France Holding Bidart - France Software Portland - USA Commercial, Sales, Marketing, support Barcelona - Spain
Radar Overlay Strong collaboration with FURUNO Japan (1st worldwide marine electronics manufacturer).
Isochrones for minimum time route optimization • Wind polar • Wave polar • Set sail • Weatherprediction (wind, waves) • Currents • Optimal route
Isochrone : Dynamicprogramming • Objective: • Maximize distance for a given time interval ∆t N D Step n →Isochrone at time ζ Reference : Knmipublicatie met nummer : 102.94 On minimal-time shiprouting S.J. Bijlsma 1975
Isochrone : Dynamicprogramming N D Wind Polars
Isochrone : Dynamicprogramming Whatis the shorterpath ? N d1 d2 a d3 d4 D
Isochrone : Dynamic programming Direct construction of next point : normal to isochrone == normal to polar N D Wind polar
Isochrone : Dynamic programming Repeat for all isochrone point, youconstructnext isochrone. N D
Isochrone : Dynamic programming Next isochrone (dash) Optimizationbecomes a geometricaloptimization. Not easyto resolve, in good computational time, takingintoaccountnumericalprecision. Multiple path for optimal route at intersection point.
Route optimization for motorboats • Main goal: fuel consumptionoptimization. But alsolimitweather conditions. • Several types of boats • Motor • Motorwithsail assistance • MotorSailing • Sailing
3D Routing • New problem : find best course (2d) and best motor speed (power) to minimize fuel consumption. • Motor and MotorSailboats have round speed polars (motoralways on) => isochrones are isodistance (shortestpath).
Fuel Consumptionmodels • Motor : • Hydro & areodynamic forces + motorconsumptioncurve. • Approximation 2nddegreefrom speed inside speed limits (18-25kts) : Conso t/nm = 0.0036*V2 + 0.1015V + 0.8848 (not linear) • MotorSailing : mutilple Wind polar curves (for eachmotor power / sail %).
FastMarchingMethodOrderedUpwindMethod • Wewanted a new method for 2D & 3D (more easy to implementthan 3D geometriccalculation). • Differentialequation : Consumption = f(x,y,t,course,motor power). • Front propagation. • Stronganisotropy : wind and wind polar (sailing) or waves.
OrderedUpwindMethod Considered are sortedaccording to cost. Reference : SIAM J. Numer. Anal., 41(1), 325–363. (39 pages) Ordered Upwind Methods for Static Hamilton--Jacobi Equations: Theory and Algorithms
OrderedUpwindMethod SmallestConsideredisremovedfromSorted Queue. It becomes the Last Accepted.
OrderedUpwindMethod All Neighbors of Last Accepted are updated. Cost and Arrival Time are computed.
OrderedUpwindMethod Again, smallestConsidered => Last Accepted
OrderedUpwindMethod The Front advancedwith 2 new Accepted. Loopuntilarrival point isreached.
OUM : 3 update methods • Direct Cost : from a node to horizontal, vertical or diagonal node. • Enumeration : minimise over 20 angles (original methodfromVladimirsky) • Gradiant : fromdownwindgradiant, select best speed vector in polar, use it to computeupwind.
Enumeration Linearcost interpolation between U2 & U3. 20 angles tried for minimization.
Experience • Difficult to validateresults : reference solution. • Gradiantwasworkingduring unit testing, wefoundproblemsduringintegration. • Parallelalgorithmis not evidence. • Software optimizationisneeded for interactive simulations.