Download
1 / 14
160 likes | 318 Views
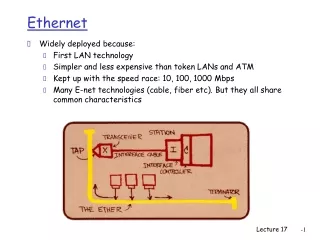
1. Two nodes transmit at the same time. 2. Node detect there has been a collision. 3. Nodes transmit a jamming signal. 4. Nodes wait a random period before retransmitted. 3. Ethernet. 3.1 Ethernet (Advantages/Problems). Problem:

E N D
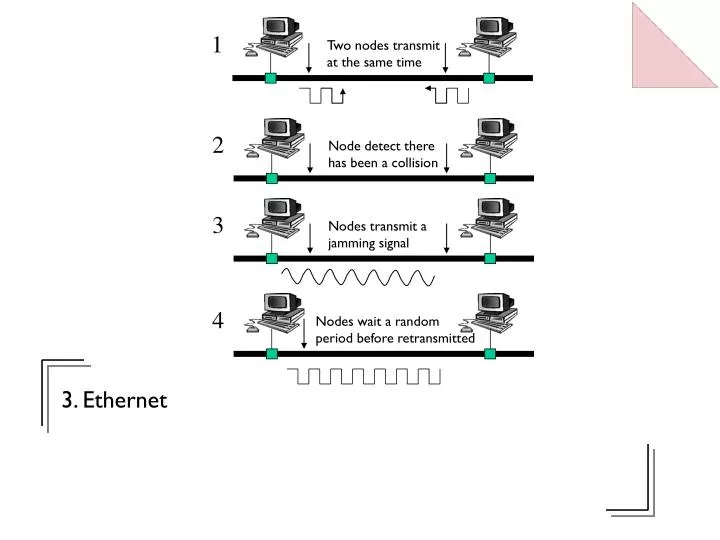
1 Two nodes transmit at the same time 2 Node detect there has been a collision 3 Nodes transmit a jamming signal 4 Nodes wait a random period before retransmitted 3. Ethernet
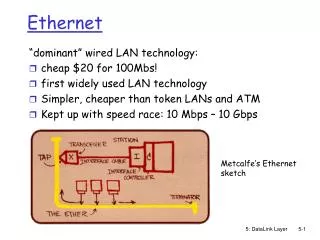
3.1 Ethernet (Advantages/Problems) Problem: A major problem with Ethernet is that, because computers must contend to get access to the network, there is no guarantee that they will get access within a given time. This contention also causes problems when two computers try to communicate at the same time, they must both back off and no data can be transmitted. All computers have access to a common bus at the same time Common bus Advantages: Ethernet networks are easy to plan and cheap to install. Ethernet network components, such as network cards and connectors, are cheap and well supported. Uses coaxial, fibre or twisted-pair cables. It is a well-proven technology, which is fairly robust and reliable. It is simple to add and delete computers on the network. It is supported by most software and hardware systems. Available as 10Mbps (10BASE), 100Mbps (100BASE) and 1Gbps (1000BASE). Dual-speed networks can be used, such as mixed 10Mbps/100Mbps networks. Network hub negotiates the required speed. Easy upgrade for different network speed. A dual-speed network can be run, and gradually upgraded. Standardised as 1EEE 802.3. Ethernet hub
3.2 CSMA/CD Two nodes transmit at the same time Nodes detect there has been a collision Nodes transmit a jamming signal All computers have access to a common bus at the same time Nodes wait a random period before retransmitted Common bus CSMA/CD Ethernet uses carrier sense, multiple access with collision detection (CSMA/CD). Nodes monitor the bus (or Ether) to determine if it is busy. A node wishing to send data waits for an idle condition then transmits its message. Collisions can occur when two nodes transmit at the same time, thus nodes must monitor the cable when they transmit. When a collision occurs, both nodes stop transmitting frames and transmit a jamming signal. This informs all nodes on the network that a collision has occurred. Each of the nodes involved in the collision then waits a random period of time before attempting a re-transmission. As each node has a random delay time then there can be a prioritisation of the nodes on the network. 1 2 3 4
Two nodes transmit at the same time Nodes detect there has been a collision Nodes transmit a jamming signal All computers have access to a common bus at the same time Nodes wait a random period before retransmitted Common bus
3.3 IEEE 802 LANs (802.2/802.3) Virtual data flow A Application Application P A Presentation Presentation Actual data flow S P A Session Session T S P A Transport Transport N T S P A Network Network D N T S P A D Data link Data link Physical Physical Sender Receiver
3.4 IEEE 802.3 data frame Others: 4 bytes for the CRC (32 bits) and 2 bytes for the LLC length (16 bits). The LLC part may be up to 1500 bytes long. The preamble and delay components define the start and end of the frame. The initial preamble and start delimiter are, in total, 8 bytes long and the delay component is a minimum of 96 bytes long. Preamble (seven bytes) precedes the Ethernet 802.3 frame. Each byte of the preamble has a fixed binary pattern of 10101010 and each node on the network uses it to synchronise their clock and transmission timings. It also informs nodes that a frame is to be sent and for them to check the destination address in the frame. Start delimiter field (SDF) is a single byte (or octet) of 10101011. It follows the preamble and identifies that there is a valid frame being transmitted. E.g. IP TCP HTTP Data Source/destination addresses (2 or 6 bytes, Most Ethernet systems use a 48-bit MAC address for the sending and receiving node. Each Ethernet node has a unique MAC address, which is normally defined as hexadecimal digits, such as: 4C-31-22-10-F1-32 (4C31 : 2210: F132) A 48-bit address field allows 248 different addresses (or approximately 281474976710000 different addresses). Delay. The end of the frame there is a 96-bit delay period, which provides the minimum delay between two frames. This slot time delay allows for the worst-case network propagation delay.
3.5 IEEE 802.3 frame delays and timings Time to transmit a single bit (for 10Mbps): Speed = 1.5108 500m Maximum and minimum time for a frame: Time to propagate 500m (assuming half the speed of light): Assuming a segment length of 500m, number of bits transmitted before a collision is detected:
3.6 Ethernet Limitations 10BASE5 10BASE2 10BASE-T 10BASE2
3.7 Ethernet types • Standard, or thick-wire, Ethernet (10BASE5). • Thinnet, or thin-wire Ethernet, or Cheapernet (10BASE2). • Twisted-pair Ethernet (10BASE-T). • Optical fibre Ethernet (10BASE-FL). • Fast Ethernet (100BASE-TX and 100VG-Any LAN). • Gigabit Ethernet (1000BASE-SX, 1000BASE-T, 1000BASE-LX and 1000BASE-CX). New standards relating to 100Mbps Ethernet are now becoming popular: • 100BASE-TX (twisted-pair) – which uses 100Mbps over two pairs of Cat-5 UTP cable or two pairs of Type 1 STP cable. • 100BASE-T4 (twisted-pair) – which is the physical layer standard for 100Mbps over Cat-3, Cat-4 or Cat-5 UTP. • 100VG-AnyLAN (twisted-pair) – which uses 100Mbps over two pairs of Cat-5 UTP cable or two pairs of Type 1 STP cable. • 100BASE-FX (fibre-optic cable) – which is the physical layer standard for 100Mbps over fibre-optic cables.
3.9 Switches and switching hubs Store-and-forward switches minimise collisions and they can store Ethernet frames and retransmit them when segment is quiet. Network backbone connection Segment switches allow simultaneous communication between any client and any server. Main server Desktop switch Desktop switch Workgroup nodes Workgroup nodes Local server Local server Local printer Local printer
3.10 802.2 and SNAP 802.2 SNAP
3.11 100BASE-4T • Cat-3 transmission (if possible, use Cat-5 with 100BASE-T). 100BASE-T uses only 2 pairs. • Zero DC level: • DC Wander (transformer coupled). • Reduced power transmission. • Reduced frequency content. • Contention-based (as 10BASE), thus maximum through is only about 50Mbps. 8B6T Input Output 0000 0000 -+0 0-+ 0000 0001 0-+ -+0 0000 0010 0-+ 0-+ 0000 0011 0-+ +0- + 0 -
3.12 100VG-AnyLAN • Non contention-based. Uses Round-Robin Arbitration Method known as demand priority access method (DPAM). Maximum through put is 96Mbps. • Nodes are connected to a hub & input ports are scanned for pending requests.A request has an in-built high or normal priority status. High: real time data; Normal:non-real-time data. • Ethernet & Token Ring Network compatible. Allows up to seven levels of hubs (One root & six cascaded hubs). This allows a number of nodes to connect to a segment. • (Limited use due to non support mechanism for data after leaving hub)