Download
1 / 1
10 likes | 132 Views
Kinematics

E N D
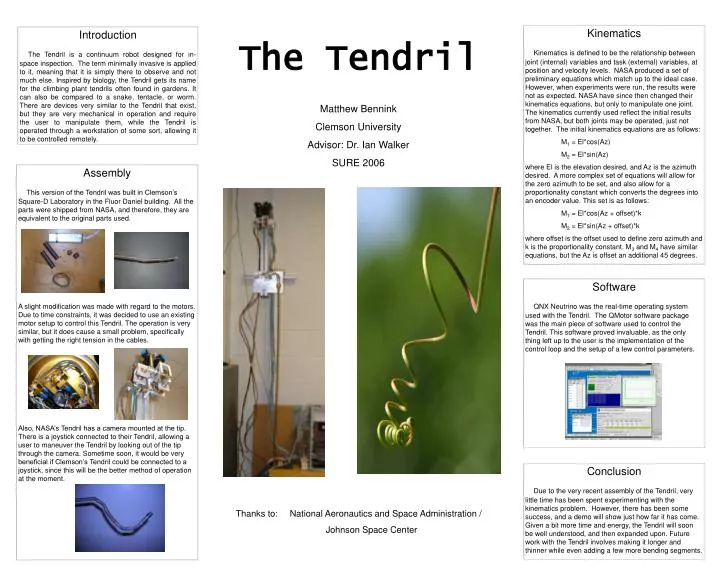
Kinematics Kinematics is defined to be the relationship between joint (internal) variables and task (external) variables, at position and velocity levels. NASA produced a set of preliminary equations which match up to the ideal case. However, when experiments were run, the results were not as expected. NASA have since then changed their kinematics equations, but only to manipulate one joint. The kinematics currently used reflect the initial results from NASA, but both joints may be operated, just not together. The initial kinematics equations are as follows: M1 = El*cos(Az) M2 = El*sin(Az) where El is the elevation desired, and Az is the azimuth desired. A more complex set of equations will allow for the zero azimuth to be set, and also allow for a proportionality constant which converts the degrees into an encoder value. This set is as follows: M1 = El*cos(Az + offset)*k M2 = El*sin(Az + offset)*k where offset is the offset used to define zero azimuth and k is the proportionality constant. M3 and M4 have similar equations, but the Az is offset an additional 45 degrees. Introduction The Tendril is a continuum robot designed for in-space inspection. The term minimally invasive is applied to it, meaning that it is simply there to observe and not much else. Inspired by biology, the Tendril gets its name for the climbing plant tendrils often found in gardens. It can also be compared to a snake, tentacle, or worm. There are devices very similar to the Tendril that exist, but they are very mechanical in operation and require the user to manipulate them, while the Tendril is operated through a workstation of some sort, allowing it to be controlled remotely. The Tendril Matthew Bennink Clemson University Advisor: Dr. Ian Walker SURE 2006 Assembly This version of the Tendril was built in Clemson’s Square-D Laboratory in the Fluor Daniel building. All the parts were shipped from NASA, and therefore, they are equivalent to the original parts used. A slight modification was made with regard to the motors. Due to time constraints, it was decided to use an existing motor setup to control this Tendril. The operation is very similar, but it does cause a small problem, specifically with getting the right tension in the cables. Also, NASA’s Tendril has a camera mounted at the tip. There is a joystick connected to their Tendril, allowing a user to maneuver the Tendril by looking out of the tip through the camera. Sometime soon, it would be very beneficial if Clemson’s Tendril could be connected to a joystick, since this will be the better method of operation at the moment. Software QNX Neutrino was the real-time operating system used with the Tendril. The QMotor software package was the main piece of software used to control the Tendril. This software proved invaluable, as the only thing left up to the user is the implementation of the control loop and the setup of a few control parameters. Conclusion Due to the very recent assembly of the Tendril, very little time has been spent experimenting with the kinematics problem. However, there has been some success, and a demo will show just how far it has come. Given a bit more time and energy, the Tendril will soon be well understood, and then expanded upon. Future work with the Tendril involves making it longer and thinner while even adding a few more bending segments. Thanks to: National Aeronautics and Space Administration / Johnson Space Center