Download
1 / 16
160 likes | 496 Views
Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments. D. Grießbach, D. Baumbach , A. Börner , S. Zuev German Aerospace Center (DLR), Institute of Robotics and Mechatronics, Dept. of Data Processing for Optical Systems, Rutherfordstr . 2, Berlin .

E N D
Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments D. Grießbach, D. Baumbach, A. Börner, S. Zuev German Aerospace Center (DLR), Institute of Robotics and Mechatronics, Dept. of Data Processing for Optical Systems, Rutherfordstr. 2, Berlin
Overview • Introduction • Integrated Positioning System • Inertial Navigation • Stereo Vision • Real time Framework • Experimental Results • Conclusions and Outlook Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
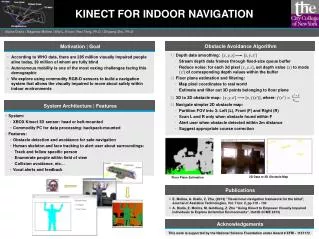
Motivation • Navigation • Determination of 6 DoF (Position, Attitude) • Path planning, collision avoidance, … Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Introduction • Assumption: • No single technology is able toprovide accurate position and attitude • Multi-sensor approach is needed • DLR research aims to: • Generic developments • Indoor/Outdoor capability • No infrastructure/external referencing • No maps (unknown environments) • No a priori assumptions • Passive system • Real time Fusion ? Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Inertial Navigation - Inertial Measurement Unit • Technology: inertial navigation, based on dead reckoning • Core component: Inertial Measurement Unit (IMU) • Angular velocity [deg/s] • Accelerations [m/s2] • Microelectromechanical System IMU (MEMS) • Small • Lightweight • Low cost • Low Energy consumption • Very robust • Already widely used Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Inertial Navigation - Mechanization • Strapdown mechanization for IMU integration Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Inertial Navigation - Mechanization • Strapdown mechanization for IMU integration • Integration • Bias Drift • Noise Random Walk • MEMS-IMUs aggravate the problem • High noise • Less stable bias • Less stable scale factors • g-dependent errors • Aiding systems are necessary! • GPS/Galileo • Camera (stereo vision) • … Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Stereo Vision – Visual Odometry • Extraction of natural feature points • Matching using epipolargeometry toconstrain the correspondence problem • Triangulating image points andto get object point • Mapping of an object point: • Prediction: • Matching and pose estimation with: Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Real Time Data Handling Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Experimental Results – Setup • Visual aided navigation with: • Stereo camera system (15 Hz) • Low cost MEMS based IMU (400 Hz) • Low cost MEMS based inclinometer • Sigma Point Kalman filter for sensor fusion • “Given” prerequisites • Synchronized measurements • Calibrated cameras • Calibrated IMU • Registered sensors Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Experimental Results – Navigation Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Experimental Results – Navigation • Unknown indoor environment • Path of about 317 m • Covering 4 floors • Closed loop for evaluation • 21 similar runs • Tracker uses about 60 Features • Frame to frame accuracy: 5 mm/0.2 deg (2 mm/0.1 deg for viewing axis) • Final distance error < 1% of total path length Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Experimental Results – Closed Loop Error Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Experimental Results – 3D Point Cloud • Parallel processing chain with matching with Semi Global Matching (SGM) • Combined with navigation solution to generate 3D point cloud • not real time yet Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Conclusion • A framework for multi-sensor navigation was presented • The framework was applied for visual aided inertial navigation withlow cost MEMS-components and stereo vision • Accuracy of < 1% of the total path length (over 21 runs) • Low textured scenes cause short periods of pure inertial navigation • Uncompensated IMU errors (scale error, g-sensitivity, …) • Additional processing of a high density 3D point cloud Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown
Outlook • Creation of reference data sets (Camera, IMU, GPS, etc.) with ground truth measurements for indoor and outdoor environments • Synchronized • Calibrated • Registered • Advancing the modelling and calibration of low cost IMUs • Integrating absolute position measurements • GNSS measurements for outdoor • RFID/Wi-Fi/Bluetooth measurements for indoor • Seamless outdoor/indoor navigation Accuracy Evaluation of Stereo Vision Aided Inertial Navigation for Indoor Environments > Denis Grießbach > ISPRS 2013 > Capetown