Download
1 / 13
130 likes | 284 Views
Radial Basis Functions and Application in Edge Detection. Project by: Chris Cacciatore, Tian Jiang, and Kerenne Paul. Abstract.

E N D
Radial Basis Functions and Application in Edge Detection Project by: Chris Cacciatore, Tian Jiang, and Kerenne Paul
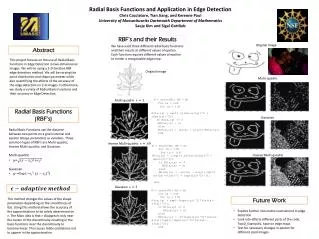
Abstract This project focuses on the use of Radial Basis Functions in Edge Detection in both one-dimensional and two-dimensional images. We will be using a 2-D iterative RBF edge detection method. We will be varying the point distribution and shape parameter. We also quantify the effects of the accuracy of the edge detection on 2-D images. Furthermore, we study a variety of Radial Basis Functions and their accuracy in Edge Detection.
Radial Basis Functions (RBF’s) Radial Basis Function RBF’s use the distances between points on a given interval and epsilon( shape parameter) as variables. Commonly Used RBF’s Multi-quadratic Inverse Multi-quadratic Gaussian Multi-quadratic = Gaussian Exp()
The - adaptive method for jump discontinuity This method changes the values of the shape parameters depending on the smoothness of f(x). Using this method allows the accuracy of the approximations to be solely determined on . The Main idea is that disappears only near the center of the discontinuity resulting in the basis functions near the discontinuity to become linear. This causes Gibbs oscillations not to appear in the approximation. Local -adaptive method
Gibbs Phenomenon Example graph for Gibbs phenomenon
Using the -adaptive method Begin by finding the jump discontinuity. This can be done by finding the first derivative/slope at the centers. Example of simple discontinuity
Multi-Quadric RBF Multi-quadratic Derivative of Multi-quadric = M = zeros(N); MD = M; for ix = 1:N for iy = 1:N M(ix,iy) = sqrt( (x(ix)-x(iy))^2 + (eps(iy))^2); if M(ix,iy) == 0 MD(ix,iy) = 0; else MD(ix,iy) = (x(ix) - x(iy))/M(ix,iy); end
Inverse Multi-Quadric RBF Inverse Multi-quadric Derivative of Inverse Multi-quadric M = zeros(N); MD = M; for ix = 1:N for iy = 1:N M(ix,iy) = 1/sqrt( (x(ix)-x(iy))^2 + (eps(iy))^2); if M(ix,iy) == 0 MD(ix,iy) = 0; else MD(ix,iy) = -(x(ix) - x(iy))/sqrt( ((x(ix)-x(iy))^2 + (eps(iy))^2)^3); end
Gaussian RBF M = zeros(N); MD = M; for ix = 1:N for iy = 1:N M(ix,iy) = exp(-((eps(iy))^2)*((x(ix)-x(iy))^2)); if M(ix,iy) == 0 MD(ix,iy) = 0; else MD(ix,iy) = -2*((eps(iy))^2)*(x(ix)-x(iy))*exp(-((eps(iy))^2)*(x(ix)-x(iy))^2); end Gaussian Derivative of Gaussian
Comparing the three Original Image Multi-quadric RBF Gaussian RBF Inverse Multi-quadric RBF
Comparing the three (cont.) Kerenne as a real person Kerenne as a multi-quadric RBF Kerenne as a Gaussian RBF Kerenne as an inverse multi-quadric RBF
Future work Explore further into matrix involvement in Edge Detection Look into effects different parts of the code, TwoD_Example1, have on edge maps
References Vincent Durante, Jae-Hun Jung. An iterative adaptive multiquadric radial basis function method for the detection of local jump discontinuities. Appl. Numer. Math. 57 (2007) 213-229