Download
1 / 9
90 likes | 221 Views
Advances in Networked Autonomous Vehicles: Technologies, Tools, and Case Studies João Borges de Sousa and Karl H. Johansson Tutorial Workshop at IEEE International Conference on Robotics and Automation Orlando, FL, USA, May 15, 2006. Workshop outline.

E N D
Advances in Networked Autonomous Vehicles: Technologies, Tools, and Case Studies João Borges de Sousa and Karl H. Johansson Tutorial Workshop at IEEE International Conference on Robotics and Automation Orlando, FL, USA, May 15, 2006
Workshop outline 13:00 Introduction, J. Borges de Sousa [U. Porto] and K. H. Johansson [KTH] Systems and Technology 13:30 Conflict avoidance in networked mobility systems: towards decentralization, A. Bicchi and L. Pallottino [U. Pisa] 14:00 Architectures for networked automation: analysis, design and implementation, E. Kolyvas, G. Nikolakopoulos, A. Panousopoulou, A. Tzesand, and J. Lygeros [U. Patras] 14:30 All stabilizing controllers for networked systems, M. Rotkowitz [KTH] 15:00 Coffe break Computational Tools 15:30 TrueTime: a simulation tool for networked control and mobile autonomous vehicles, K.-E. Årzén [Lund U.] 16:00 Dynamic programming algorithms for autonomous vehicle control, I. Mitchell [U. British Columbia] Case Studies 16:30 Information-theoretic approach for concurrent path and sensor planning for a UAV with EO/IR sensors, J. Hamberg and P. Skoglar [Swedish Defence Agency] 17:00 Case studies in networked vehicle systems, J. Borges de Sousa [U. Porto] 17:30 ZigBee in industrial applications: a test case, M. Strand and N. Aakvaag [ABB] 18:00 Closing
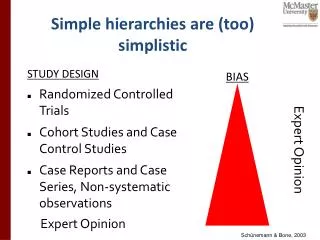
Motivation • Unprecedented interactions between technological developments in computing and communications have led to the design and implementation of robotic and automation systems consisting of networked vehicles, sensors, and actuator systems. • These developments enable researchers and engineers not only to design new robotic systems but also to develop visions for systems that could have not been imagined before. • There is a need now for a unifying paradigm within the robotics community to address the design of these networked automation systems.
Coms. links UAV Mixed-initiative UAV Surface buoy Autonomous surface vehicle Localization links Sensing links AUV AUV Vision Control station Navigation beacon Drifting sensors Oceanographic sensors Moored sensors Control station Moored sensors AUV
Control System with evolving structure What is the state of the system? What is the space of controls? How to incorporate mixed initiative interactions? What is a control strategy? Control under communication constraints Tools Deployment of dynamic networks hybrid automata Interoperability and standards Real time code generation and distribution Challenges Mixed initiative interactions Teams Of teams Individual teams Vehicles Sensors Others World
Challenges • The challenges to existing approaches and theories come from the distributed nature of networked automation problems. • In networked vehicle, sensor, and actuator systems, information and commands are exchanged among multiple vehicles and systems, and the roles, relative positions, and dependencies of those vehicles and systems change during operations. • These challenges entail a shift in the focus of existing methodologies: • from prescribing and commanding the behavior of isolated systems to prescribing and commanding the behavior of networked systems. • The intrinsic nature of networked automation requires an interdisciplinary approach from robotics, control, computer and communication scientists.
Applications • Applications of networked automation are already pervasive in most fields of human endeavor. • Examples: • Factory automation and inter-factory coordination • Environmental and oceanographic field studies • Military automation • Mixed-initiative control of automated systems • Automated highway systems • Air-traffic management • Sensor networks
Networked Automation Interest Group • Networked Automation Interest Group of the European Robotics Research Network • Coordinators: João Borges de Sousa [U. Porto] and Karl Henrik Johansson [KTH] • Homepage: http://www.fe.up.pt/~naig Objectives • To promote an interdisciplinary approach to the modeling, control, and implementation challenges posed by networked automation. • To foster cooperation within the group based on a shared view of these challenges and of the underlying scientific issues. • To develop case studies and benchmark challenges drawn from applications conceivable in a near future in cooperation with technology and tools developers, and life scientists. • To develop common technological challenges and shared experimental demonstrations. • To promote tools and technologies interchange and exchange of researchers. • To promote the development of undergraduate and graduate curricula with courses on networked automation.
Activities of the interest group • Workshops on the following themes: • Applications and system concepts – to bring together technology and tools developers, and scientists from the nature and social sciences to discuss current and future case studies and to state concrete technical challenges to be addressed by the community. • Interdisciplinary research studies – to bring together robotics, control, computer and communication scientists to further the cooperation among these scientists and to provide them with challenges drawn from applications. • Summer schools – to promote the development of courseware on networked automation and to attract the attention of young researchers. • Invited sessions – to present and disseminate results at major robotics, control, communications, and computer science conferences. • Networked cooperation – to develop a repository for tools and data sharing and a workflow environment for collaborative work over the Internet. • Cooperative demonstrations – to bring together institutions to demonstrate the integration of tools and technologies in selected applications.