Download
1 / 10
100 likes | 222 Views
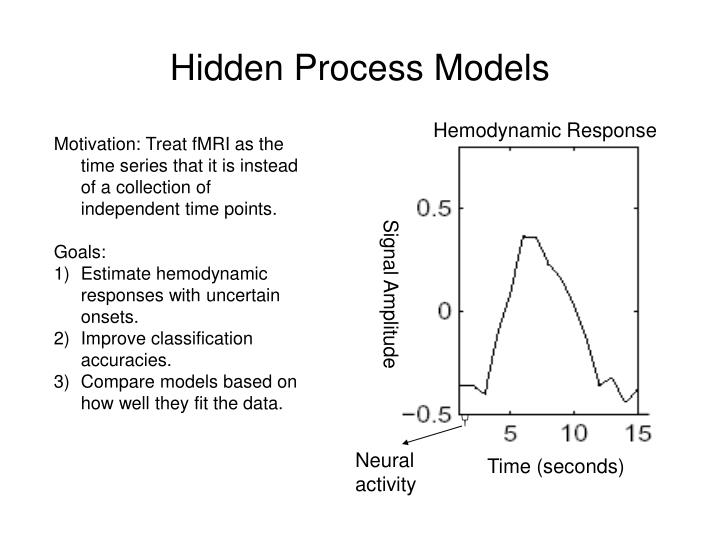
Hidden Process Models. Hemodynamic Response. Motivation: Treat fMRI as the time series that it is instead of a collection of independent time points. Goals: Estimate hemodynamic responses with uncertain onsets. Improve classification accuracies.

E N D
Hidden Process Models Hemodynamic Response • Motivation: Treat fMRI as the time series that it is instead of a collection of independent time points. • Goals: • Estimate hemodynamic responses with uncertain onsets. • Improve classification accuracies. • Compare models based on how well they fit the data. Signal Amplitude Neural activity Time (seconds)
Study: Pictures and Sentences Press Button View Picture Read Sentence • Task: Decide whether sentence describes picture correctly, indicate with button press. • 13 normal subjects, 40 trials per subject. • Sentences and pictures describe 3 symbols: *, +, and $, using ‘above’, ‘below’, ‘not above’, ‘not below’. • Images are acquired every 0.5 seconds. Read Sentence Fixation View Picture Rest t=0 4 sec. 8 sec. [Keller et al, 2001]
Process 1: ReadSentence Response signature W: Duration d: 11 sec. Offsets W: {0,1} P(): {q0,q1} Process 2: ViewPicture Response signature W: Duration d: 11 sec. Offsets W: {0,1} P(): {q0,q1} Processes of the HPM: v1 v2 v1 v2 Input stimulus : sentence picture Timing landmarks : Process instance:2 Process h: 2 Timing landmark: 2 Offset O: 1 (Start time: 2+ O) 1 2 One configuration c of process instances 1, 2, … k: (with prior fc) 1 2 Predicted mean: + N(0,s1) v1 v2 + N(0,s2)
Encoding Experiment Design Processes: Input stimulus : ReadSentence = 1 ViewPicture = 2 Timing landmarks : 1 2 Decide = 3 Configuration 1: Configuration 2: Configuration 3: Configuration 4:
Inference • Over configurations • Choose the most likely configuration, where: • C=configuration, Y=observed data, D=input stimuli, HPM=model
Learning • Parameters to learn: • Response signature W for each process • Timing distribution Q for each process • Standard deviation s for each voxel • Expectation-Maximization (EM) algorithm to estimate W and Q. • E step: estimate a probability distribution over configurations. • M step: update estimates of W (using reweighted least squares) and Q (using standard MLEs) based on the E step. • After convergence, use standard MLEs for s.
5-fold cross-validated classification accuracies for ReadSentence vs. ViewPicture HPM-GNB = 2 process HPM in which the processes do NOT overlap temporally. Uses the HPM noise model (one std dev per voxel). HPM-N-K = N process HPM in which the ViewPicture and ReadSentence processes overlap temporally but have known onsets (the stimulus times) HPM-N-U = N process HPM in which the ViewPicture and ReadSentence processes overlap temporally and have unknown onset (0 or 0.5 seconds after the stimulus)
HPM-3-U, Participant L, Decide Process Each location shows the learned Decide response signature parameters averaged over time for that voxel, minus the mean value of that voxel over all the time points in the training data.
Extensions • Regularization penalties on process response signatures. • Process response signatures expressed as weights on basis functions. • Continuous offset values/continuous process response signatures. • HPMs as DBNs with/without process ordering constraints.