Download
1 / 28
280 likes | 407 Views
This Friday 20-minute test on material in lectures 1-7 during lecture. Rotational Motion 10.5 Relation between angular and linear variables 10.6 Kinetic Energy of Rotation 10.7 Rotational Inertia 10.8 Torque 10.9 Newton 2 for rotation 10.10 Work and Power. Summary Lecture 11.

E N D
This Friday 20-minute test on material in lectures 1-7 during lecture Rotational Motion 10.5 Relation between angular and linear variables 10.6 Kinetic Energy of Rotation 10.7 Rotational Inertia 10.8 Torque 10.9 Newton 2 for rotation 10.10 Work and Power Summary Lecture 11 Tomorrow 12 – 2 pm PPP “Extension” lecture. Room 211 podium level Turn up any time Problems:Chap.10:6, 7, 16, 21, 28 , 33, 39, 49
s q r Relating Linear and Angular variables q and s Need to relate the linear motion of a point in the rotating body with the angular variables s = qr
s v r Relating Linear and Angular variables w and v s = qr w Not quite true. V, r, and w are all vectors. Although magnitude of v = wr. The true relation isv = wx r
w r v Direction of vectors v = x r Grab first vector (w) with right hand. Turn to second vector (r) . Direction of screw is direction of third vector (v).
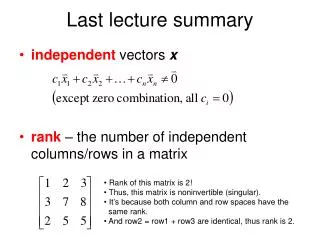
A B Ay = Asin Ax = Acos Vector Product C = A x B A = iAx + jAyB = iBx + jBy So C = (iAx + jAy) x (iBx + jBy) = iAx x(iBx + jBy)+ jAy x(iBx + jBy) = ixi AxBx + ixj AxBy + jxi AyBx + jxj AyBy now ixi = 0 jxj = 0 ixj = kjxi = -k So C = 0 + kAxBy - kAyBx +0 C= ABsin = 0 - kABsin
Is a vector? Rule for adding vectors: The sum of the vectors must not depend on the order in which they were added. However is a vector!
v a r w Since w = v/r this term = v2/r(or w2r) This term is the tangential accel atan. (or the rate of increase of v) Relating Linear and Angular variables a and a The centripetal acceleration of circular motion. Direction to centre
a and a a a = ar&v2/r Central accelerationPresent even whenais zero! Tangential acceleration (how fast v is changing) Relating Linear and Angular variables The acceleration “a” of a point distance “r” from axis consists of 2 terms: Total linear acceleration a a r
The Falling Chimney CM L gcosq g The whole rigid body has an angular accelerationa The tangential accelerationatan distance r from the base isatan = ar q At the CM:atan = aL/2, and at the end:atan = aL But at the CM,atan= g cosq(determined by gravity) The tangential acceleration at the end is twice this, but the acceleration due to gravity of any mass point is onlyg cosq. The rod only falls as a body because it is rigid ………..the chimney is NOT.
w cm What is the KE of theRotating body? 1/2 MVcm2 ?? It is clearly NOT ½ MV2cm since Vcm = 0
Kinetic Energy of Rotation V1 V2 w m2 V3 m1 m3 Krot = ½m1v12 + ½m2v2 2 +½m3v3 2 + But all these values of v are different, since the masses are at different distances from the axis. However w (angular vel.) is the same for all. We know that v = wr. So that Krot=½m1(wr1)2+½m2(wr2)2+½m3(wr3)2+ = ½miri2w2 Krot = ½ w2 miri2
I= miri2 Krot=½m(wr1)2+½m(wr2)2+½m(wr3)2+ . . . . . . = ½miri2w2 = ½ w2miri2 Krot=½ I w2 WhereIis Rotational Inertia or Moment of Inertia of the rotating body SoKrot = ½ I w2 (compare Ktrans= ½ m v2)
Rotational inertia moment of inertia
RotationalInertia I= mi ri2 “I” is the rotational analogue of inertial mass“m” For rotational motion it is not just the value of “m”, but how far it is from the axis of rotation. The effect of each mass element is weighted by the square of its distance from the axis The further from the axis, the greater is its effect.
Krot = ½ I w2 The bigger I , the more KE is stored in the rotating object for a given angular velocity A flywheel has (essentially) all its mass at the largest distance from the axis.
M R Some values of rotational inertia for mass M Mass M on end of (weightless) rod of length R I= mi ri2 =MR2
M/2 M/2 R 2 Masses M/2 on ends of (weightless) rod of length 2R (dumbell of mass M) Some values of rotational inertia for mass M I= mi ri2 =1/2MR2 + 1/2MR2 = MR2 Same as mass M on end of rod of length R ...MR2
R Some values of rotational inertia for mass M Mass M in a ring of radius R Same as mass M on end of rod, Same as dumbell...MR2 I= mi ri2 = mi R2 = MR2
x Rotation axis Linear density (kg/m) L thickness dx Rotational Inertia of a thin rod about its centre For finite bodies I = mi ri2 mass M mass of the rod M = L M
Parallel-axis Theorem CM h Axis of Rotation The rotational inertia of a body about any parallel axis, is equal to its R.I. about an axis through its CM, PLUS R.I. of its CM about a parallel axis through the point of rotation I = ICM + Mh2
Proof of Parallel-axis Theorem h One rotation about yellow axis involves one rotation of CM about this axis plus one rotation of body about CM. I = Icm + Mh2
What is it about here? RI of ring of mass M about CM is MR2 Example R RI of CM about suspension point, distance R away is MR2. So total RI is 2MR2
The Story so far... , , relation to linear variables vector nature Rotational Variables Rotational kinematics with const. Analogue equations to linear motion Rotation and Kinetic Energy Rotational Inertia