Download
1 / 1
10 likes | 154 Views
S. S. S. ¤. ¤. ¤. S. S. ¤. ¦. X. X. ¦. ¦. ±. ±. X. X. X. ±. X. X. X. X. X. X. X. X. X. ±. ¦. . . . . S. y. y. x. x. =. =. S. S. ¤. S. k. k. k. k. k. k. k. k. k. k. k. k. ¤. k. k. S. T. T. T. ¦. ±. X. X. X. X. X. X. X. q.

E N D
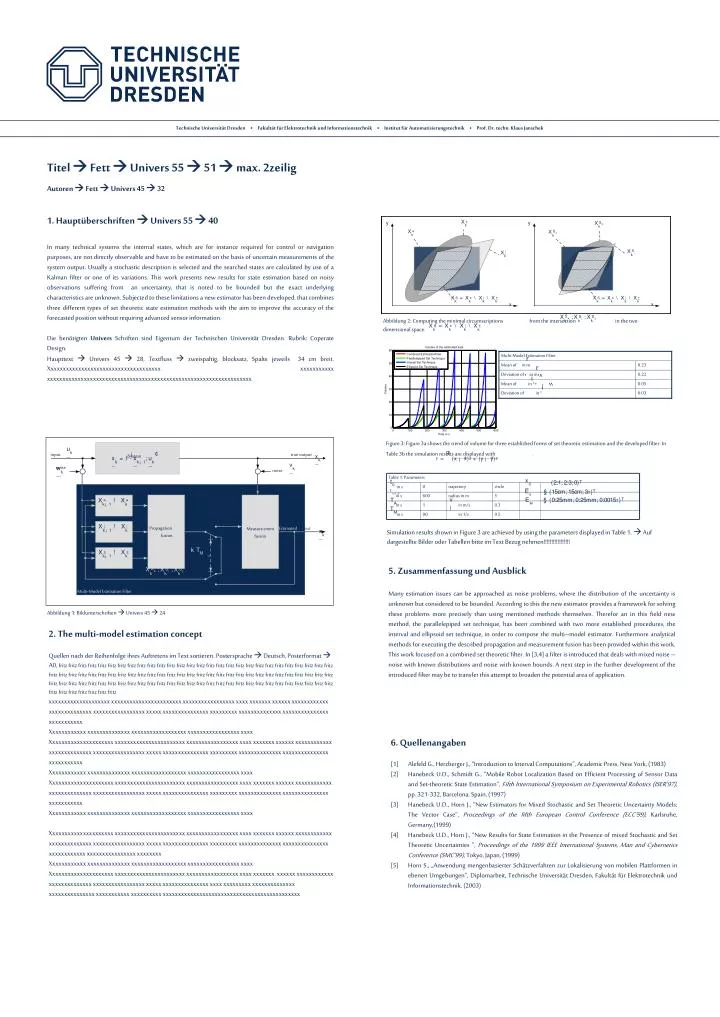
S S S ¤ ¤ ¤ S S ¤ ¦ X X ¦ ¦ ± ± X X X ± X X X X X X X X X ± ¦ \ \ \ \ S y y x x = = S S ¤ S k k k k k k k k k k k k ¤ k k S T T T ¦ ± X X X X X X X q S S ¤ ¤ ¦ ± ¡ ¢ \ \ ^ ^ ¤ ( ( ( ) ) ) k f X ¦ ± T ¡ ¡ X ± ¦ X X X X X X X ~ ± ± T E E T = 2 1 1 0 5 2 2 5 3 0 1 5 0 2 5 3 0 0 0 1 5 2 2 t t ¦ ± § § ' ' r r ' ' k k k k k k k ( ) ( ) v x x u x x u w ^ ^ v x ! c m m m c m m m ; ; = ! ! ! M ¡ + ¡ d A M 0 k k k k k k k k k k k k k k 1 k k k r 0 x ¡ x y y 1 1 1 ¡ ¡ ¡ e w v n = ; ; ; : ; : : ; ; ; : ; ; : Figure 3: Figure 3a shows the trend of volume for three established forms of set theoretic estimation and the developed filter. In Table 3b the simulation results are displayed with . true output input System noise noise Multi-Model Estimation Filter Mean of in m 0.23 Deviation of in m 0.22 Mean of in ° 0.05 Deviation of in ° 0.03 Propagation fusion Estimated output Measure-ment fusion Simulation results shown in Figure 3 are achieved by using the parameters displayed in Table 1. Auf dargestellte Bilder oder Tabellen bitte im Text Bezug nehmen!!!!!!!!!!!!!!!!! Multi-Model Estimation Filter Table 1: Parameters in s 0 trajectory circle in s 600 radius in m 5 in s 1 in m/s 0.3 in s 90 in 1/s 0.5 Titel Fett Univers 55 51 max. 2zeilig Autoren Fett Univers 45 32 1. Hauptüberschriften Univers 55 40 In many technical systems the internal states, which are for instance required for control or navigation purposes, are not directly observable and have to be estimated on the basis of uncertain measurements of the system output. Usually a stochastic description is selected and the searched states are calculated by use of a Kalman filter or one of its variations. This work presents new results for state estimation based on noisy observations suffering from an uncertainty, that is noted to be bounded but the exact underlying characteristics are unknown. Subjected to these limitations a new estimator has been developed, that combines three different types of set theoretic state estimation methods with the aim to improve the accuracy of the forecasted position without requiring advanced sensor information. Die benötigten Univers Schriften sind Eigentum der Technischen Universität Dresden. Rubrik: Coperate Design. Haupttext Univers 45 28, Textfluss zweispaltig, blocksatz, Spalte jeweils 34 cm breit. Xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx Abbildung 2: Computing the minimal circumscriptions from the intersection in the two dimensional space. 5. Zusammenfassung und Ausblick Many estimation issues can be approached as noise problems, where the distribution of the uncertainty is unknown but considered to be bounded. According to this the new estimator provides a framework for solving these problems more precisely than using mentioned methods themselves. Therefor an in this field new method, the parallelepiped set technique, has been combined with two more established procedures, the interval and ellipsoid set technique, in order to compose the multi–model estimator. Furthermore analytical methods for executing the described propagation and measurement fusion has been provided within this work. This work focused on a combined set theoretic filter. In [3,4] a filter is introduced that deals with mixed noise – noise with known distributions and noise with known bounds. A next step in the further development of the introduced filter may be to transfer this attempt to broaden the potential area of application. Abbildung 1: Bildunterschriften Univers 45 24 2. The multi-model estimation concept Quellen nach der Reihenfolge ihres Auftretens im Text sortieren.Postersprache Deutsch, Posterformat A0, fritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritzfritz fritz fritz xxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx xxxxxxx xxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxxx xxxxxxxxxxxxxxx xxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxx xxxxxxxxxxx Xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx Xxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx xxxxxxx xxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxxx xxxxxxxxxxxxxxx xxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxx xxxxxxxxxxx Xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx Xxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx xxxxxxx xxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxxx xxxxxxxxxxxxxxx xxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxx xxxxxxxxxxx Xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx Xxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx xxxxxxx xxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxxx xxxxxxxxxxxxxxx xxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxxxx xxxxxxxx Xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx Xxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxx xxxxxxx xxxxxx xxxxxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxxxx xxxxx xxxxxxxxxxxxxxx xxxx xxxxxxxxx xxxxxxxxxxxxxx xxxxxxxxxxxxxxx xxxxxxxxxxx xxxxxxxxxx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx 6. Quellenangaben [1] Alefeld G., Herzberger J., “Introduction to Interval Computations”, Academic Press, New York, (1983) [2] Hanebeck U.D., Schmidt G., “Mobile Robot Localization Based on Efficient Processing of Sensor Data and Set-theoretic State Estimation“,Fifth International Symposium on Experimental Robotics (ISER'97), pp. 321-332, Barcelona, Spain, (1997) [3] Hanebeck U.D., Horn J., “New Estimators for Mixed Stochastic and Set Theoretic Uncertainty Models: The Vector Case”, Proceedings of the fifth European Control Conference (ECC’99), Karlsruhe, Germany,(1999) [4] Hanebeck U.D., Horn J., “New Results for State Estimation in the Presence of mixed Stochastic and Set Theoretic Uncertainties”, Proceedings of the 1999 IEEE International Systems, Man and Cybernetics Conference (SMC’99), Tokyo, Japan, (1999) [5] Horn S., „Anwendung mengenbasierter Schätzverfahren zur Lokalisierung von mobilen Plattformen in ebenen Umgebungen”, Diplomarbeit, Technische Universität Dresden, Fakultät für Elektrotechnik und Informationstechnik, (2003)