Download
1 / 34
360 likes | 679 Views
CHAPTER.12. Kinematics of a particle. Mechanics of rigid body. mechanics of rigid body. Galilei. Statics. Dynamics. Statics. Dynamics. Newton. Euler. Lagrange. Equilibrium. Σ F = 0. Kinematics. Kinetics. v=ds/dt a=dv/dt. Σ F = m a. 12.1 Introduction.

E N D
CHAPTER.12 Kinematics of a particle
Mechanics of rigid body mechanics of rigid body Galilei Statics Dynamics Statics Dynamics Newton Euler Lagrange Equilibrium Σ F = 0 Kinematics Kinetics v=ds/dt a=dv/dt Σ F = m a 12.1 Introduction
12.2 Rectilinear Kinematics: Continuous motion Kinematics Analysis of the geometric aspects of motion. Particle A particle has a mass but negligible size and shape. Rectilinear Kinematics Kinematics of objects moving along straight path and characterized by objects position, velocity and acceleration. Position(1) position vector r A vector used to specify the location of particle P at any instant from origin O.
(2) position coordinate , S An algebraic scalar used to represent the position coordinate of particle P scalar vector r’ r r Ds P P’ o s s’ from O to P. • DisplacementChange in position of a particle , vector (1) Displacement or
(3) Speed speed = magnitude of velocity = | v |Average speed = Total distance/elapsed time = • (2) DistanceTotallength of path traversed by the particle. A positive scalar. • Velocity(1) Average velocity (2) Instantaneous Velocity
Acceleration (1) Average acceleration (2) (Instantaneous) acceleration • Relation involving a , s and vv=ds/dt, dt=ds/va=dv/dt, dt=dv/a • so, ds/v=dv/a vdv=ads
10. Analysis Procedure • Coordinate System • A. Establish a position coordinate s along the path. • B. Specify the fixed origin and positive direction of the coordinate. (2) Kinematic Equations A. Know the relationship between any two of the four variables a, v, a and t. B. Use the kinematic equations to determine the unknown varaibles
S V a t t t 12.3 Rectilinear Kinematics : Erratic Motion
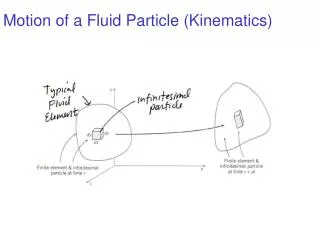
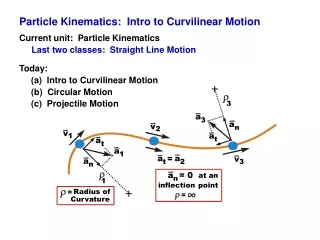
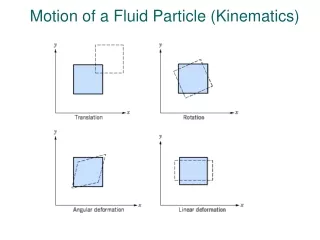
p 12-4 General Curvilinear Motion 1. Curvilinear motion The particle moves along a curved path. Vector analysis will be used to formulate the particle’s position, velocity and acceleration.
p s p’ r r r ’ o p s r (t) o 2. Position s 3. Displacement = change in position of particle form p to p’
4. Velocity p v p’ r r r ’ o (1) average velocity 平均 (2) Instantaneous velocity 瞬時 = “tangent” to the curve at Pt .p = “tangent” to the path of motion (3) Speed
Hodograph 5. Acceleration (1) Average acceleration = time rate of change of velocity vectors Hodogragh is a curve of the locus of points for the arrowhead of velocity vector. (2) Instantaneous acceleration which is not tangent to the curve of motion, but tangent to the hodograph.
s path p z r y θ x 12-5 Curvilinear Motion : Rectangular components xyz : fixed rectangular coordinate system
1. Position vector Here = magnitude of = unit vector = direction of
2. Velocity 0 0 0 tangent to the path
: initial velocity : Constant downward acceleration : velocity at any instant a= - g j (v0)y v0 (v0)x y v v0 x 12.6 Motion of a projectile
Acceleration Vector a == + = -g = ax + ay V0 = (Vx)o + (Vy)o (known) Position Vector (x,y components) = x + y initial position = xo + yo Velocity Vector = = x + y = Vx + Vy
1. Horizontal motion, ax=0 Vx = (Vx)0 + axt = (Vx)0 X = X0 + (Vx)0t Same as 1st Eq. One independent eqn X = X0 + (Vx)0t
2. Vertical motion, ay=-g constant Can be derived from above two Eqs. two independent eqns
12-7 Curvilinear Motion:Normal and Tangential components. n o’ ρ path o un p t ut Path of motion of a particle is known. 1. Planar motion s Here: t (tangent axis ): axis tangent to the curve at P and positive in the direction of increasing S; ut: unit vector n (normal axis ): axis perpendicular to t axis and directed from P toward to the center of curvature o’; un: unit vector o’ = center of curvature r = radius of curvature p = origin of coordinate system tn
un o’ ρ ut’ dθ un p ut’ dθ p ds dut ut ut (1) Path Function (known) (2) Velocity (3) Acceleration
at: Change in magnitude of velocity an: Change in direction of velocity If the path in y = f ( x )
r:radial coordinate , :transverse coordinate , 12-8 Curvilinear Motion:Cylindrical Components • Polar coordinates (1) coordinates (r,q) q r p r o Reference line (2) Position (3) Velocity
rate of change of the length of the radial coordinate. angular velocity (rad/s)
(4) Acceleration angular acceleration
3D z y r x 2. Cylindrical coordinates Position vector Velocity Acceleration
A B A B 12.9 Absolute Dependent Motion Analysis of Two Particles • Absolute Dependent MotionThe motion of one particle depends on the corresponding motion of another particle when they are interconnected by inextensible cords which are wrapped around pulleys.
(1)position-coordinate equation A. Specify the location of particles using position coordinates having their origin located at a fixed point or datum line. B. Relate coordinates to the total length of card lT (2)Time Derivatives Take time derivatives of the position-coordinate equation to yield the required velocity and acceleration equations. 2.Analysis procedure
3. Example Datum Datum B A • position-coordinate equation (2) Time Derivatives
xyz:fixed framex’y’z’:translating frame moving with particle ArA、rB : absolute positions of particle A & BrB/A : relative position of B with respect to A z’ A y’ z rA rB/A x’ o y rB B x 12.10 Relative-Motion Analysis of Two Particles • Translating frames of referenceAframe of reference whose axes do not rotate and are only permitted to translate relative to the fixed frame.
A rA rB/A rA rB rB/A O B rB aB/A:acceleration of B as seen by an observer located at A and translating with x’y’z’ frame. • position vector 3. velocity Vector VB/A : relative velocity observed from the translating frame. 4. acceleration vector