Download
1 / 24
270 likes | 405 Views
RADIO FREQUENCY BASED SERIAL COMMUNICATION . By Ankit Kashyap ( reg.no – 0801222080) Ajay Kumar Rath ( reg.no- 0801222222). ABSTRACT.

E N D
RADIO FREQUENCY BASED SERIAL COMMUNICATION.. By AnkitKashyap( reg.no – 0801222080) Ajay Kumar Rath( reg.no- 0801222222)
ABSTRACT The mode of communication in now in a advanced mode of communication that is the radio frequency serial base communication. Serial mode communication has more advantage than the parallel i.e. it facilitates less data traffic. The main part that in the circuit is max 232, microcontroller, lcd and power supply. Keil software is used to write the program. There are 2 section that is TX and RX. MAX 232 is used to maintain the voltage. 8051 microcontroller is connected to MAX 232 , power supply and lcd . Here three control signal are used those are RS, E, N/W. Using this technology we can detect the thing very easily and even data can be send to far area. For security purpose we can also use it .
RF MODULES ARE OF TWO TYPES FREQUENCY MODULE (IT WORKS THROUGH ENCODER AND DECODER) COMMUNICATION MODULE (IT USES TX AND RX)
communication It is of two types Serial communication Parallel communication parallel: expensive - short distance – fast – no modulation Serial: cheaper– long (two different cities by modem)-slow
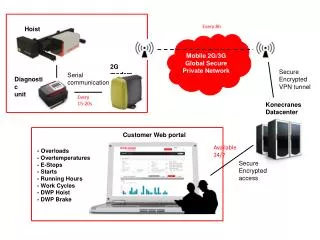
So we have consider the serial communication for the transmission purpose. For which we have to consider the transmitter section and receiver section . In the matter to be concerned these two thing are more important while discussing the block diagram.The block diagram has two section TX section RX sectionTX is the transmitter section and RX is the receiver section TX section consist of 1. Antenna 2. Power supply 3. Max 232 4. pc RX section consist of Fr module Max 232 Power supply 8051 microcontroller Lcd
BLOCKDIAGRAM TX Antenna Power supply Rx section MAX 232 Pc MAX 232 acts as a voltage stabilizer that control the maintains the voltage Between pc and rf section. The operating range from the antenna and rf section is 10 m . In the communication channel internally a buffer is required . Radio buffer is used to store the data which is used in TX and RX transmission. The communication channel is MAX 232 . In rf section also their exist one TX and RX. Because in block they have a specified task for transmitting and receiving.
RX Antenna Power supply LCD Control signal 8051 Micro Controller AD0-AD7 RF module MAX 232 RS Address /data bus N/W E Lcd is used to show the data. Even here the max 232 is used for the same Purpose i.e. . For constant voltage. The RX and TX have 2 antenna ranging in kHz. The functioning of all the above material required is briefly discussed later. Max 232 is also called as driver IC.
POWER SUPPLY There are many types of power supply. Most are designed to convert high voltage AC mains electricity to a suitable low voltage supply for electronics circuits and other devices. A power supply can by broken down into a series of blocks, each of which performs a particular function.
TRANSFORMER : Transformer coverts ac electricity from one voltage to another . It wastes very little power i.e. power out is equal to power in . Note that as voltage is stepped down current is stepped up . Step down transformer is used here .A step-down transformer has a large number of turns on its primary (input) coil which is connected to the high voltage mains supply, and a small number of turns on its secondary (output) coil to give a low output voltage. Turns ratio= Vp/ Vs=Np/Ns Power out =power in VsX Is=VpX Ip Vp= primary voltage Np=no of turns on primary coil. Ip= primary (input current )
2) RECTIFIER: Depending upon the no of diode used the type of rectifier varies. If there are 4 diode then a bridge rectifier is used . This is a widely used configuration, both with individual diodes wired as shown and with single component bridges where the diode bridge is wired internally. A typical bridge ckt . Similarly half wave rectifier and full wave rectifier also can be used. Here ripples can be removed by using filter.
3) SMOOTHING: Smoothing is performed by a large value electrolytic capacitor connected across the DC supply to act as a reservoir, supplying current to the output when the varying DC voltage from the rectifier is falling. Smoothing significantly increases the average DC voltage to almost the peak value (1.4 × RMS value). Smoothing is not perfect due to the capacitor voltage falling a little as it discharges, giving a small ripple voltage.For many circuits a ripple, which is 10% of the supply voltage, is satisfactory and the equation below gives the required value for the smoothing capacitor. A larger capacitor will give less ripple. The capacitor value must be doubled when smoothing half-wave DC. .
4) REGULATOR: Most digital logic circuits and processors need a 5-volt power supply. To use these parts we need to build a regulated 5-volt source. Usually you start with an unregulated power supply ranging from 9 volts to 24 volts DC (A 12 volt power supply is included with the beginner kit and the Microcontroller. To make a 5 volt power supply, we use a LM7805 voltage regulator IC (Integrated Circuit). The IC is shown below.
MAX 232 It should be noted that the MAX 232(A) is just a driver/receiver. It does not generate the necessary RS-232 sequence of marks and spaces with the right timing, it does not decode the RS-232 signal, it does not provide a serial/parallel conversion. All it does is to convert signal voltage levels. Generating serial data with the right timing and decoding serial data has to be done by additional circuitry, e.g. by a 16550 UART. Typically a pair of a driver/receiver of the MAX232 is used for TX and RX And the second one for CTS and RTS. There are not enough drivers/receivers in the MAX232 to also connect the DTR, DSR, and DCD signals. Usually these signals can be omitted when e.g. communicating with a PC's serial interface.
IC AND PIN DIAGRAM OF MAX 232 PIN DIAGRAM IC ‘S
LCD( liquid crystal display) To display the data the lcd are used . we are now replacing led by lcd due to various advantages of lcd when compare to led . That is due to the ability of lcd to display no and character and graphics . Ic diagram of lcd Vce (contrast pin) this pin is used to control brightness of lcd or resolution of lcd. Vcc +ve and gnd –ve .
Lcd does not display directly. It is also a type of control. So for that even we need some command.Each an every command has it own characteristic i.e. their control vary such as OX38 – to decide the length of the pixel of the alphabet. OXOE- it is a command used for indicating cursor .OXO6- it is used for the cursor increment. OX01- to create the data.OX80- line 1 address of the lcd. OXCO-line 2 address of lcd . Pin diagram of lcd
CONTROL SIGNAL There are 3 control signal that connect the lcd and microcontroller. Those are Rf W/ R E RS : When RS =0 then the value at AD0 to AD6 will act as command that is the OX38, OXOE,OXO6,OXO1, OX01,OX80 will be the commands . And if RS=1 then the value will act as data. RS means the register selector . W/R: It is read or write pin . While aching the data internally then then W/R=1 and if we are writing the data from lcd then W/R=0.
E: It is the enable pin it is used for triggering pulse for command execution or data execution. E=1 set bit or else E=0th then clear bit instructions are used. Enable pin is connected to P2.2 then set bit P2.2 Call delay Clr P2.2 RS pin is connected to P2.0 R/W is connected to P2.1.
8051 MICROCONTROLLER A microcontroller not only accepts the data as inputs but also manipulates it, interfaces the data with various devices, controls the data and thus finally gives the result. • All these tasks are possible with the microcontroller because the microcontroller has a CPU in addition to a fixed amount of RAM, ROM, I/O ports and timer all on a single chip.Microcontroller is a programmable device. A microcontroller has a CPU in addition to a fixed amount of RAM, ROM, I/O ports and a timer embedded all on a single chip. The fixed amount of on-chip ROM, RAM and number of I/O ports in microcontrollers makes them ideal for many applications in which cost and space are critical
Pin diagram Of 8051.
Four ports are there and they are P0,P1 , P2,P3 PORTS 0, 1, 2 & 3: The four ports P0, P1, P2 and P3 each use 8 pins, making them 8-bit ports. All the ports upon RESET are configured as input, since P0-P3 have value FFH on them. PORT 0(P0): Port 0 is also designated as AD0-AD7, allowing it to be used for both address and data. ALE indicates if P0 has address or data PORT 1 & PORT 2With no external memory connection, both P1 and P2 are used as simple I/O. With external memory connections, port 2 must be used along with P0 to provide the 16-bit address for the external memory. Port 2 is designated as A8-A15 indicating its dual function. While P0 provides the lower 8 bits via A0-A7, it is the job of P2 to provide bits A8-A15 of the address.
PORT 3: Port 3 occupies a total of 8 pins, pins 10 through 17. It can be used as input or output. P3 does not need any pull-up resistors, the same as port 1 and port 2. Port 3 has an additional function of providing some extremely important signals such as interrupts. Two common interrupts are TX and RX. Two general interrupts are INT0 and INT1 (uses P3.2, P3.3) Two timer interrupts are T0,T1(P3.4, P3.5) Two peripheral interrupt are Rd,WR( P3.6, P3.7)
REFERENCES www.wikipedia.com www.atmel.com www.microcontroller.com • www.wiley.com