Download
1 / 46
460 likes | 754 Views
第四章 基本体的三视图. 第一节 基本体三视图. 常见的基本几何体. 曲面基本体 ( 表面由曲面或平面与曲面构成 ). 平面基本体 ( 表面由平面构成 ). 本章内容是在研究点、线、面投影的基础上进一步论述立体的投影作图问题。. 立体表面是由若干面所组成。表面均为平面的立体称为 平面立体 ;表面为曲面或平面与曲面的立体称为 曲面立体 。. 在投影图上表示一个立体,就是把这些平面和曲面表达出来,然后根据可见性原理判断那些线条是可见的或是不可见的,分别用实线和虚线来表达,从而得到 立体的投影图 。. 一、平面基本体的投影.

E N D
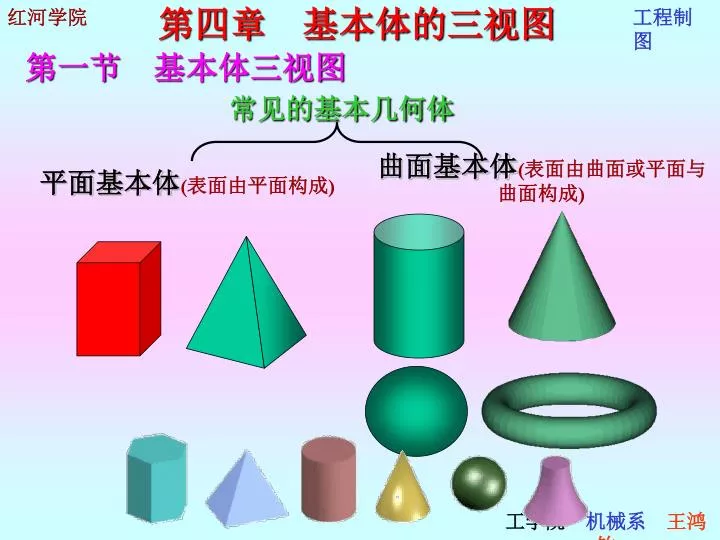
第四章 基本体的三视图 第一节 基本体三视图 常见的基本几何体 曲面基本体(表面由曲面或平面与曲面构成) 平面基本体(表面由平面构成) 工学院 机械系王鸿钧
本章内容是在研究点、线、面投影的基础上进一步论述立体的投影作图问题。本章内容是在研究点、线、面投影的基础上进一步论述立体的投影作图问题。 立体表面是由若干面所组成。表面均为平面的立体称为平面立体;表面为曲面或平面与曲面的立体称为曲面立体。 在投影图上表示一个立体,就是把这些平面和曲面表达出来,然后根据可见性原理判断那些线条是可见的或是不可见的,分别用实线和虚线来表达,从而得到立体的投影图。 工学院 机械系王鸿钧
一、平面基本体的投影 平面基本体的投影实质是关于其表面上点、线、面投影的集合,且以棱边的投影为主要特征,对于可见的棱边,其投影以粗实线表示,反之,则以虚线示之。在投影图中,当多种图线发生重叠时,应以粗实线、虚线、点画线等顺序优先绘制。 平面基本体的各表面都是平面,平面与平面的交线称为棱线,棱线与棱线的交点称为顶点。平面基本体可分为棱柱体和棱锥体。 工学院 机械系王鸿钧
一、平面基本体的投影 b a a A (B) (b) b a 1.棱柱 ⑴ 棱柱的组成 由两个底面和几个侧棱面组成。侧棱面与侧棱面的交线叫侧棱线,侧棱线相互平行。 ⑵ 棱柱的三视图 ⑶ 棱柱面上取点 先画反映底面形状的视图。 点的可见性规定: 若点所在的平面的投影可见,点的投影也可见;若平面的投影积聚成直线,点的投影也可见。 由于棱柱的表面都是平面,所以在棱柱的表面上取点与在平面上取点的方法相同。 工学院 机械系王鸿钧
正六 棱柱的三视图 Z Z e' d' a' a" d" e" E A D c' b' YW X b" 棱柱具有这样的投影特点:一个投影反映底面实形,而其余两投影则为矩形或复合矩形。 c" B C X a e Y b dc YH 作投影图时,先画出正六棱柱的水平投影正六边形,再根据其它投影规律画出其它的两个投影。如图所示。 e’ a” d’ d” a’ b’ c” c’ b” a (b) d(c) e 返回 正六棱柱的投影图 工学院 机械系王鸿钧
b’’ a a b a C’’ C’ 例:求棱柱表面上A、B、C三点的三面投影。 (b’) C 工学院 机械系王鸿钧
S C s A B s k K k n׳ ﴾n﴿ a c a c s k N n b 2.棱锥 ⑴ 棱锥的组成 由一个底面和几个侧棱面组成。侧棱线交于有限远的一点 锥顶。 ⑵ 棱锥的三视图 ⑶ 在棱锥面上取点 棱锥处于图示位置时,其底面ABC是水平面,在俯视图上反映实形。侧棱面SAC为侧垂面,另两个侧棱面为一般位置平面。 同样采用平面上取点法。 b a(c) b 工学院 机械系王鸿钧
D E F 棱锥表面取点方法: 在棱线上的点: 利用棱线的投影求之。 利用棱面的积聚性投影求之; 在棱面上的点: 利用素线法求之; 利用辅助平面法求之; 工学院 机械系王鸿钧
Z s’ s” m’ a’ b’ c” c’ a”(b”) YW X a b s c Y H 正三棱锥的三面投影图 例:求棱锥表面上点M的三面投影 方法一: 利用素线法 连接s’m’并延长,与a’c’交于2’, 在投影ac上求出Ⅱ点的水平投影2。 m” 连接s2,即求出直线SⅡ的水平投影。 2’ 根据在直线上的点的投影规律,求出M点的水平投影m。 m 2 再根据知二求三的方法,求出m”。 工学院 机械系王鸿钧
s’ s” m’ a’ b’ c” c’ a”(b”) a b s c 正三棱锥的三面投影图 利用辅助平面法 方法二: 过m’作m’1’ ∥a’c’,交s’a’于1’。 求出Ⅰ点的水平投影1。 1’ 过1作1m ∥ac,再根据点在直线上的几何条件,求出m 。 1 m 再根据知二求三的方法,求出m”。 工学院 机械系王鸿钧
s s 2 2 S Ⅱ a c c b a (b) b C c s B 2 A a 工学院 机械系王鸿钧
s s S 3 (3) a c c b a (b) b C 3 c s B A a Ⅲ 工学院 机械系王鸿钧
二、曲面基本体的投影 曲面基本体的表面是曲面或曲面与平面,绘制它们的投影时,由于它们的表面没有明显的棱线,所以,需要画出曲面的转向线。曲面上的转向线是曲面上可见投影与不可见投影的分界线。在投影面上,当转向线的投影与中心线的投影重合时,规定只画中心线。 在机械工程中,用得最多的曲面基本体是圆柱、圆锥、圆球和圆环这四种回转体。作它们在投影面上的投影就是把组成立体的回转面或平面和回转面的投影表示出来,并判别可见性。下面主要介绍这些回转体的性质及其画法。 工学院 机械系王鸿钧
O A A1 O1 a a a a 母线 1.圆柱体 ⑴ 圆柱体的组成 ⑵ 圆柱体的三视图 转向轮廓线 ⑶ 转向轮廓线——素线的投影 与曲面的可见性的判断 ⑷ 圆柱面上取点 底面投影的积聚性 工学院 机械系王鸿钧
利用45º线作图 a״ a׳ k" k' a k 工学院 机械系王鸿钧
2.圆锥体 S O O1 s ● (n) k k n ● s (n) ● ● k 母线 ⑴ 圆锥体的组成 由圆锥面和底面组成。 圆锥面是由直线SA绕与它相交的轴线OO1旋转而成。 S称为锥顶,直线SA称为母线。圆锥面上过锥顶的任一直线称为圆锥面的素线。 ● ⑵ 圆锥体的三视图 A ⑶ 轮廓线素线的投影与 曲面的可见性的判断 ⑷ 圆锥面上取点 在图示位置,俯视图为一圆。另两个视图为等边三角形,三角形的底边为圆锥底面的投影,两腰分别为圆锥面不同方向的两条轮廓素线的投影。 如何在圆锥面上作直线? 过锥顶作一条素线。 s ★辅助直线法 圆的半径? ★辅助圆法 工学院 机械系王鸿钧
n k n k n k 3.圆球 ⑴ 圆球的形成 圆母线以它的直径为轴旋转而成。 ⑵ 圆球的三视图 三个视图分别为三 个和圆球的直径相等的 圆,它们分别是圆球三 个方向轮廓线的投影。 ⑶ 轮廓线的投影与曲 面可见性的判断 ⑷ 圆球面上取点 圆的半径? 辅助圆法 工学院 机械系王鸿钧
例1: 已知三棱锥棱线上一点的V面投影1′和另一点的V面投影2′,求两点的其它各面相应投影1″、1及2、2″。 作图步骤: ⑴过点的V面投影1’作水平投射线,投射线与W面相应棱线投影的交点即为投影1”;根据“宽一致”的投影规律,在W面投影中量取1”的Y坐标值,然后在H面相应棱线的投影上直接量取Y,得H面投影1。 ⑵过点的V面投影2’分别作水平投射线和垂直投射线,水平投射线与W面相应棱线投影的交点即为投影2”,垂直投射线与H面相应棱线投影的交点即为投影2。 y 1“ 1′ 2′ 2″ 2 y 1 工学院 机械系王鸿钧
例2:已知圆锥对V面的转向轮廓线上点的1′投影,求1″、1;又知它对V面的转向轮廓线上点的水平投影2,求2′、2″。例2:已知圆锥对V面的转向轮廓线上点的1′投影,求1″、1;又知它对V面的转向轮廓线上点的水平投影2,求2′、2″。 作图步骤: ⑴过点的V面投影1’作水平投射线,投射线与圆锥对W面的转向轮廓线的交点即为投影1”;根据“宽一致”的投影规律,以轴线为基准,在W面投影中量取投影1”的Y坐标值Y1,然后在圆锥对W面的转向轮廓线的H面投影上直接量取Y1,得投影1。 ⑵过点的H面投影2向上作竖直投射线,投射线与圆锥对V面转向轮廓线的V投影的交点即为投影2’;然后过2’作水平投射线,投射线与此转向轮廓线的W面投影的交点即为投影2”。 Y1 1″ 1′ 2′ 2″ Y1 2 1 工学院 机械系王鸿钧
例3:如图所示,已知球面对V面的转向轮廓线上点的1’投影,求1”、1;又知它对V的转向轮廓线上的点水平投影2,求2’、2”。例3:如图所示,已知球面对V面的转向轮廓线上点的1’投影,求1”、1;又知它对V的转向轮廓线上的点水平投影2,求2’、2”。 球面转向轮廓线上点的投影的求解步骤与上一图例相似,作图过程如图所示。 y 2’ 1” 1’ 2” 2 y 1 工学院 机械系王鸿钧
4、圆环 ⑴圆环的形成 圆环面是由一个完整的圆绕轴线回转一周而形成,轴线与圆母线在同一平面内,但不与圆母线相交。 工学院 机械系王鸿钧
⑵圆环的三视图 点划线圆 表示:母线圆心的轨迹 主、左视图是极限位置素线(圆)和内、外环分圆的投影; 俯视图是上、下的投影。 工学院 机械系王鸿钧
(3)圆环表面取点 k’’ k’ k 工学院 机械系王鸿钧
m' (n') 作辅助平面:过点M作垂直于轴线的 辅助平面(水平面), 其与外环面相交于一个圆。 (n) m 工学院 机械系王鸿钧
第二节 AutoCAD三维实体创建的基本方法 一、三维坐标系 • UCS为WCS的图标 (b) UCS图标 • 三维坐标系图标 1. 直角坐标 2. 柱面坐标 3. 球面坐标 工学院 机械系王鸿钧
建立三维用户坐标系 1. 功能 2. 调用 菜单:工具(T)→命名UCS(U) 命令行:UCS 建立UCS的子菜单 工学院 机械系王鸿钧
三维视图 三维视图子菜单 工学院 机械系王鸿钧
(a) 西南等轴测视图图标 (b) 东南等轴测视图图标 (c) 东北等轴测视图图标 (d) 西北等轴测视图图标 等轴测视图UCS图标 视图工具栏 工学院 机械系王鸿钧
二、绘制三维实体的方法 绘制三维实体,首先进行三维建模,再进行着色。 AutoCAD提供3种三维建模方式:线框建模、表面建模和实体建模。实体建模是最方便、最容易使用的一种方法。这里着重介绍建模方法。 工学院 机械系王鸿钧
“实体”子菜单 “实体”工具栏 工学院 机械系王鸿钧
㈠用实体命令绘制基本体 1 .绘制长方体 ⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→长方体(B) 命令行:BOX 工具栏: 长方体 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→圆柱体(C) 命令行:CYLINDER 工具栏: 2 .创建圆柱体 圆柱体 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→圆锥体(O) 命令行:CONE 工具栏: 3 .创建圆锥体 圆锥体 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→楔体(W) 命令行:WEDGE 工具栏: 4. 创建楔体 楔体 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→球体(S) 命令行:SPHERE 工具栏: 2 .创建球体 球体 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→圆环体(T) 命令行:TORUS 工具栏: 6. 创建圆环体 工学院 机械系王鸿钧
圆环体 特殊圆环体 工学院 机械系王鸿钧
1. 功能 2. 调用 菜单:绘图(D)→实体(I)→拉伸(X) 命令行:EXTRUDE 工具栏: ㈡ 创建拉伸实体 拉伸前 拉伸后 工学院 机械系王鸿钧
1. 功能 2. 调用 菜单:绘图(D)→实体(I)→旋转(R) 命令行:REVOLVE 工具栏: (三)创建旋转实体 按给定角度旋转实体 工学院 机械系王鸿钧
㈣ 创建组合实体 “实体编辑”子菜单 “实体编辑”工具栏 工学院 机械系王鸿钧
差集实例 并集实例 交运算后 交集实例 交运算前 并集、差集综合实例 工学院 机械系王鸿钧
实体的布尔运算 工学院 机械系王鸿钧
⑴ 功能 ⑵ 调用 菜单:绘图(D)→实体(I)→剖切(L) 命令行:SLICE 工具栏: ㈤ 用剖切的方法绘制实体 工学院 机械系王鸿钧
练习题绘制下图所示零件剖开前后的三维实体。 零件剖开前后的轴测图 工学院 机械系王鸿钧
命令行: SOLPROF 工具栏: 三、由三维实体图自动转换为三视图和轴测图的方法 步骤 (1)在模型空间画出三维实体模型或插入画好三维实体模型; (2)单击“菜单”栏→“视口”→“新建视口”或单击工具栏图标 屏幕出现视口(Viewports)对话框,如图所示。 工学院 机械系王鸿钧
⑶单击图标 ,出现提示: 选择对象:(选择俯视图对象后) 回车 是否在单独的图层中显示隐藏的轮廓线?[是(Y)/否]]<是>:回车 是否将轮廓线投影到平面?[是(Y)/否(N)]<是>:回车 是否删除相切的边?[是(Y)/否(N)]<是>:回车 分别将主视图、左视图和轴测图执行俯视图同样的操作。 ⑷确定比例对齐视图 命令: ZOOM (回车) 指定窗口角点,输入比例因子 (nX 或 nXP),或[全部(A)/中心点(C)/动态(D)/范围(E)/上一个(P)/比例(S)/窗口(W)] <实时>: 0.5XP (回车) 按此操作方式,逐一将三个视图变成想同的比例。 ⑸关闭三维实体图形所在图层(或点击模型按钮进入模型空间,删除三维实体图形)。 工学院 机械系王鸿钧
