Download
1 / 33
340 likes | 493 Views
(Station Dependent) Correlation in VLBI Observations. John M. Gipson NVI, Inc./NASA GSFC 4 th IVS General Meeting 9-11 January 2006 Concepcion, Chile. Agenda. Quick review of observations and formal errors in VLBI Evidence for (unmodeled) station-dependent delay

E N D
(Station Dependent) Correlation in VLBI Observations John M. Gipson NVI, Inc./NASA GSFC 4th IVS General Meeting 9-11 January 2006 Concepcion, Chile
Agenda • Quick review of observations and formal errors in VLBI • Evidence for (unmodeled) station-dependent delay • Sources of station-dependent delay • Handling station-dependent delay • Results • Conclusions
Independence of Observations Suppose that we have a VLBI observation at time ton baselineij. This is related to the “true” delay by: Here eijis the noise associated with the observation. The standard assumption in VLBI is that all observations are independent, that is, that the noise terms are not correlated between observations: The d’s on the right indicate that the covariance is 0 for observations of different baselines, or the same baseline at different times.
What do the formal errors depend on? Number of parameters grows ~ Nstat!
What do the formal errors depend on? Number of observations grows ~ Nstat^2.
What do the formal errors depend on? Can improve formal errors by increasing number of scans OR increasing number of stations
What do the formal errors depend on? A key hidden assumption is that the observations are uncorrelated.
Are the observations independent? Is observational noise uncorrelated? • We do not have direct access to the observation noise term eij. • We need to approach study of correlation indirectly. • Use the residuals to a solution (=Dij) as a proxy for eij. My approach: Look at the residuals to the solution of an RDV experiment to see if they are correlated. RDVs have many observations, and many large net-work scans. This makes uncovering correlations easier.
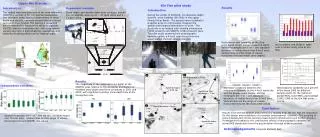
Evidence From RDV48Delay Residuals for Source 1418+546 @ 2004-12-01-18:06:59 • This table gives the residual delay for all observations in a given scan. “AVG” is the average delay over all baselines involving this station. “SIG” is the formal errors for this average (based on the formal errors of the baseline observations). • The delay between FD-VLBA and KP-VLBA is 31 ps. • The average residual delay for FD is 14 ps • For FD the formal error is 2 ps.
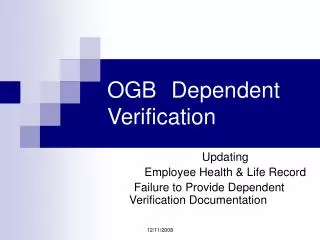
RDV50: RMS Residual Delay per Station Note: This gives no indication of the origin of the residuals. This residual delay could be due to unmodeled atmosphere, cable variation, other effects or a combination of all of these. Conclusion: Based on RDVs, there is significant evidence of station-dependent correlated noise.
Sources of Station-Dependent Delay Noise • Unmodeled (or incorrectly modeled) atmosphere. Expect that this will be larger at lower elevations. • Unmodeled cable length variations. • Unmodeled clock variation. This is elevation independent. • Other sources of real station delay, e.g. phase cal.
Atmosphere modeling • Simplest model of the atmosphere assumes it is elevation dependent and axially symmetric: “Mapping function” • Next order model adds gradient term. • Departures of the atmosphere from this simple model show up as station dependent delay. • Kolmogorov turbulence predicts that these departures ~ cot(el)^2/3.
Evidence From GPS Data from: John Braun, Christian Rocken, and Randolph (“Stick”) Ware: Validation of Line-of-Sight Water Vapor measurements in GPS Analysis and graphing of data is original.
Modeling Station-Dependent Delay Assume that the delay takes the following form: Here the d’s are the station-dependent delay. Assume that these are not correlated with each other, or with the baseline noise. I also assume that the station-dependent delay is uncorrelated at different times. This seems reasonable based on the RDVs. (Note that some of the time dependent variation is soaked up by clocks.)
Handling Station Dependent Delays • Estimate Delays Explicitly. • For each N station scan, need N nuisance parameters. • Normal equations become singular. Introduce weak constraints. • Number of parameters estimated increases greatly. • Building the normal equations takes longer. • Inversion of normal equations takes longer, since inversion ~Npar^3 • Modify Normal Equations • Use full covariance information for each scan. • Computation of normal equations slows down ~3. • Inversion takes same amount of time.
Modification of Normal Equations Standard Least Squares equations for uncorrelated observations: Here A are the parameters you are estimating, theB are the “O-C”, and the Fare the derivatives. For correlated observations, normal equations become: Here Cov is the covariance of the observations. For uncorrelated observations, the covariance matrix is diagonal, and this reduces to the standard case.
Building up the Normal Equation • By assumption, station dependent delays are uncorrelated across time. The covariance matrix is block diagonal, with each block being for a single scan. • Divide the data into scans. • For each scan, compute FTCov-1F and FTCov-1B. • Sum these up over all scans to get the full normal equations.
Calculation of Covariance Station dependent delay has two effects. (Note that each observation is labeled by a pair of indices denoting the baseline.) The b terms are new. 1. Inflation of diagonal terms: 2. Introduction of off-diagonal terms. These are non-0 only if there is a station in common. (In this equation the pair ij is not the same as the pair lm.)
Covariance Example. 3-Station Scan. Assume we have a 3 station scan, with baselines 12, 23, and 31 in that order. Then the covariance matrix will be: 12 23 31 12 23 31 In this case all of the off-diagonal terms are populated. For larger networks this won’t be the case. Only diagonal terms that have a common station will be non-0. For a 4-station net-work there are 6 observations involving baselines 12, 13, 14, 23, 24, and 34. The off-diagonal terms involving the pairs of baselines (12,34), (13,24), and (14,23) will all be 0 since they have no stations in common.
What are the b’s? • Atmosphere delay ~(cot(el)^(2/3)) • From GPS, coefficient is ~ 1.5 mm=5ps • May also have constant (non-el dependent) terms. • From RDV study, total size ~5-15 ps. Atmosphere mis-modeling Cable, clock, etc. Both C and A are on the order of 5-10 ps
Empirical Tests • Used all R1s, R4s and CONT sessions from 2005. • Did standard baseline independent solution. • Did several solutions with different additive correlated noise: • The “A” and the “C” parameters were varied in 5ps steps. • Also did solutions with no off-diagonal terms. • Accounts for additional noise • Doesn’t account for correlation between observations. • Calculated baseline repeatability. • Found difference in baseline repeatability between the “standard” solution and “new” solutions.
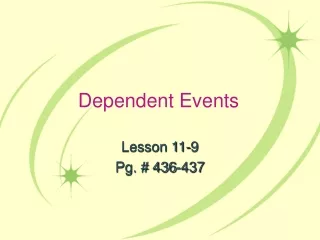
Effect of covariance on Formal Errors Notice dependence on number of stations
Effect of covariance on Formal Errors • Station dependent noise: • Increases the formal errors. • Puts a station independent floor on formal errors.
Conclusions • Clear evidence from RDVs that there is unmodeled station dependent delay noise terms. • GPS data indicates the presence of unmodeled atmosphere delay. • There may be other sources of delay as well: cable, clocks, etc. • Accounting for the correlation: • Reduces baseline scatter. • Makes the formal errors more realistic. • In VLBI, most of the unmodeled-station-dependent-delay appears to be “atmosphere like”. • Reduction in scatter is not due to down-weighting the data: correlation between observations is necessary.