Download
1 / 12
120 likes | 348 Views
EG1C2 Matrix Algebra - Information Sheet. Note, information such as that on this sheet is provided for students when they do their tests and in their Part 1 exam. Matrix Definitions. a ij is element in row i column j of A. Determinants. Determinant of A , det A = | A | =. |a 11 | = a 11.

E N D
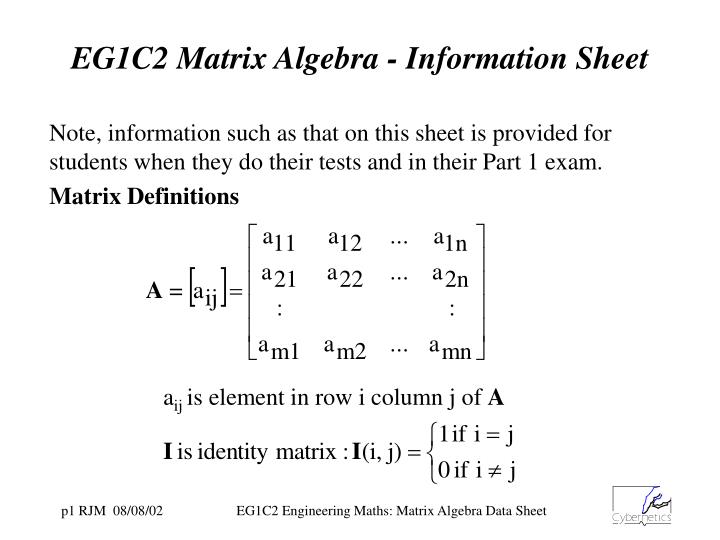
EG1C2 Matrix Algebra - Information Sheet • Note, information such as that on this sheet is provided for students when they do their tests and in their Part 1 exam. • Matrix Definitions aij is element in row i column j of A EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Determinants Determinant of A, detA = |A| = |a11| = a11 Determinant of a matrix A omitting ith row and jth column is Mij The cofactor of element i,j, Cij, is (-1)i+jMij |A| = a11*C11 + a12*C12 + .. + a1n*C1n EG1C2 Engineering Maths: Matrix Algebra Data Sheet
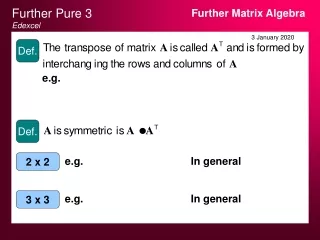
Adjoint, Inverse and Transpose If A is square, the Adjoint matrix of A, Adj(A), = [Cji] = [Cij]T (A-1)-1 = AA * A-1 = A-1 * A = I (A * B)-1 = B-1 * A-1 AT is the transpose of matrix A. (AT)T=A (A+B)T=AT+BT (A*B)T=BT*AT A is a symmetrix matrix if AT=A. A is a skew-symmetrix matrix, if AT=-A If AT=A-1 then A is an orthogonal matrix. EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Gaussian Elimination: to solve for x in A x = b Then process until A part is triangular, using row operations row X := p * row Y + q * row Z EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Gauss Jordan To invert matrix A Then do row operations until left half = I, A-1 is right half EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Cramer’s Theorem A linear system, described by equation Ax = b, has solutions: x1 = D1/D x2 = D2/D ... xm = Dm/D where D is |A| and Dk is determinant of A when kth column replaced by b. Rank of m*n matrix Is the largest square submatrix whose determinant is non zero. A submatrix is a matrix with any row and/or column removed. EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Transformation Matrices For transforming point x,y to point x’,y’ If T is product of such matrices, x,y transformed to x’,y’ by EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Eigenvalues and Eigenvectors Suppose A is an n*n matrix, l a scalar and x an n element vector. An eigenvalue of A is any value for l which is a solution to the equation A*x - l*x = 0 for which x <>0. The n eigenvalues are found by solving |A - l*I| = 0. The n eigenvectors are the n vectors which satisfy (A - l*I) x = 0 for each of the n values of l. State Space Equations EG1C2 Engineering Maths: Matrix Algebra Data Sheet
State Space Solutions, for A is 2*2 If A has 2 real non repeating eigenvalues l1 and l2 and eigenvalues L1and L2, general solution is x = c1*L1*el1t + c2*L2*el2t (c1 and c2 are constants). If eigenvalues are complex, l1, l2 = a jb, and eigenvectors are L1, L2 = A jB, then the response is (for constants ca and cb): x = eat { caA (cos (bt) + sin (bt) ) + cbB (cos (bt) – sin(bt) ) } {Equivalent to the above expression: ca=c1+c2 and cb=j(c1-c2)} If A has repeated eigenvalue l and eigenvector the response is x = c1*L*elt + c2*(t L+V) *elt where V is the solution of (A - lI)V = EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Two Port Networks Can be defined by: ‘A’ matrices for the following simple elements: If two elements in series are described by matrices A1 and A2, the matrix describing the elements combined is A1 * A2 EG1C2 Engineering Maths: Matrix Algebra Data Sheet
These networks can also be defined by the ‘Z’, ‘Y’ or ‘H’ matrices EG1C2 Engineering Maths: Matrix Algebra Data Sheet
Table to convert between these two port network matrices EG1C2 Engineering Maths: Matrix Algebra Data Sheet