Download
1 / 24
280 likes | 552 Views
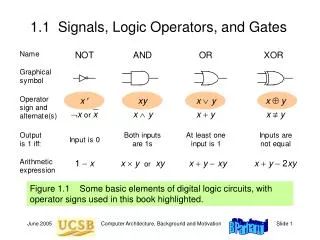
ELEC 303 – Random Signals. Lecture 21 – Random processes Dr. Farinaz Koushanfar ECE Dept., Rice University Nov 19, 2009. Lecture outline. Basic concepts Gaussian processes White processes Filtered noise processes Noise equivalent bandwidth. Things to remember. Stationary

E N D
ELEC 303 – Random Signals Lecture 21 – Random processes Dr. Farinaz Koushanfar ECE Dept., Rice University Nov 19, 2009
Lecture outline • Basic concepts • Gaussian processes • White processes • Filtered noise processes • Noise equivalent bandwidth
Things to remember • Stationary • A random process is stationary if time shift does not affect its properties • For all T, and for all sets of sample times, (t0,…,tn), P(X(t0)x0,…,X(tn)xn) = P(X(T+t0)x0,…,X(T+tn)xn) • Stationary random processes have constant mean, defined as E[X(t)] = mX • For stationary RPs, autocorrelation depends on the time difference between the samples • RX(t1,t2)=E[X(t1)X(t2)] = RX(=t1-t2)
Exact definition WSS • A process is wide sense stationary if its expected power is finite |E[X2(t)|<, its mean is constant, and its autocorrelation depends only on the time difference between samples • WSS processes: stationary in 1st and 2nd moment • Stationary processes are WSS, but not vice versa • Power spectral density (PSD) • Defined only for WSS processes • The Fourier transform of the autocorrelation function • Expected power is the integral of the PSD
Gaussian processes • Widely used in communication • Because thermal noise in electronics is produced by the random movement of electrons closely modeled by a Gaussian RP • In a Gaussian RP, if we look at different instances of time, the resulting RVs will be jointly Gaussian: Definition 1: A random process X(t) is a Gaussian process if for all n and all (t1,t2,…,tn), the RVs {X(ti)}, i=1,…,n have a jointly Gaussian density function.
Gaussian processes (Cont’d) • It is obvious that if X(t) and Y(t) are jointly Gaussian, then each of them is individually Gaussian • The reverse is not always true • The Gaussian processes have important and unique properties Definition 2: The random processes X(t) and Y(t) are jointly Gaussian if for all n and all (t1,t2,…,tn), and (1,2,…,m)the random vector {X(ti)}, i=1,…,n, {Y(j}, j=1,…,m have an n+m dimensional jointly Gaussian density function.
Important properties of Gaussian processes • Property 1: If the Gaussian process X(t) is passed through an LTI system, then the output process Y(t) will also be a Gaussian process. Y(t) and X(t) will be jointly Gaussian processes • Property 2: For jointly Gaussian processes, uncorrelatedness and independence are equivalent
White processes Definition 3: A random process X(t) is a called a white process if it has a flat spectral density, i.e., SX(f) is constant for all f • White processes are those where all frequency components appear with equal power • Thermal noise can be modeled as a white noise over a wide range of frequencies • A wide range of information sources can be modeled as the output of LTI systems driven by a white process
Power of a white process • SX(f)=C, (C is a constant), then • Obviously, no real physical process can have an infinite power • Thus, the white process is not a meaningful physical process. • Quantum mechanical analysis of natural noise shows it has a power spectral density given by
White processes • Quantum mechanical analysis of natural noise shows it has a power spectral density given by
White noise • Thermal noise, though not precisely white, can be modeled as a white process for all practical purposes • PSD is Sn(f) = kT/2 (denoted by N0) = N0/2 • Autocorrelation Rn() = -1[N0/2]=N0/2 (t) • For all 0, we have RX()=0 • Thus, two samples of noise at t1 and t2 will be uncorrelated • If the RP is white and Gaussian, any pair of RVs X(t1) and X(t2) are independent for t1t2
Example 1 • A stationary RP passes through a quadrature filter defined by h(t)=1/t • What are the mean and autocorrelation functions of the output? • What is the cross correlation between input and output? Using the fact that and that RX() has no DC component.
Properties of thermal noise • Thermal noise is a stationary process • Thermal noise has a zero mean process • Thermal noise is a Gaussian process • Thermal noise is a white process with a power spectral density Sn(f) = kT/2 • Thermal noise increases with increasing ambient temperature, cooling circuits lowers the noise
Filtered noise process • In many cases, the noise in one stage of the process gets filtered by a bandpass filter • Frequency of bandpass is fc, away from zero • The bandpass filters can be expressed in terms of the inphase and quadrature components: • E.g., single frequency signal is an extreme case: • x(t) = A Cos(2fct + ) = A Cos()Cos(2fct)–A Sin() Sin(2fct) = xcCos(2fct) - xsSin(2fct) {Phasor: Aej = xc+ j xs} • More generally: x(t) = xc(t) Cos(2fct) - xs(t) Sin(2fct) • In phase component: xc(t) = A(t) Cos ((t)) • Quadrature component: xs(t) = A(t) Sin ((t))
Bandpass Filter • X(t) is the output of an ideal bandpass filter of bandwidth W centered at fc • Examples:
Filtered noise • Filtered thermal noise is Gaussian but not white • Power spectral density: • For the examples on the last slides, For ideal filter:|H(f)|2=H(f)
Filtered noise components • All filtered noise signals have in-phase and quadrature components that are lowpass, i.e., X(t) = Xc(t) Cos(2fct) - Xs(t) Sin(2fct) • In-phase and quadrature components: • Xc(t) and Xs(t) are zero-mean, low pass, jointly stationary, and jointly Gaussian random processes • If the power in process X(t) is PX, then the power in each of the processes Xc(t) and Xs(t) is also PX
Properties of Xc and Xs • Both have a common amplitude • Shifting the positive frequencies to the left by fc • Shifting the negative frequencies to the right by fc • If H1(f) and H2(f) are used, then • P1=4WN0/2=2N0W, P2=2WN0/2=N0W
Noise equivalent bandwidth • A white Gaussian noise passing through a filter would be Gaussian but not white • We have SY(f) = SX(f)|H(f)|2=.5 N0|H(f)|2 • We have to integrate SY(f) to get the power • Define Bneq, the noise equivalent bandwidth Hmax is the maximum of |H(f)| in the Filter’s passband
Noise equivalent bandwidth Hmax is the maximum of |H(f)| in the Filter’s passband • Thus, given Bneq, finding the output noise becomes a simple task • The of filters and amplifiers are usually given by the manufacturers
Example • Find the noise equivalent bandwidth of a low pass filter =RC
Summary: Gaussian processes • X(t) is a Gaussian process if Yg=0T g(t) X(t) dt is Gaussian for any T and function g • Linear filtering of a Gaussian process results in a Gaussian process • Samples of a Gaussian process are jointly Gaussian random variables • Uncorrelated samples of a Gaussian process are independent
Summary: white noise • White noise is defined as a WSS random processes with a flat PSD: Sn(f) = N0/2 • The autocorrelation of white noise is N0/2 (t) • White noise is the most random form of noise since it decorrelates randomly! http://www.stanford.edu/class/ee179/multi/lecture16-multi.pdf
Summary: filtered noise • Filtered thermal noise is Gaussian but not white • The bandpass filters can be expressed in terms of the inphase and quadrature components x(t) = xc(t) Cos(2fct) - xs(t) Sin(2fct) • In phase component: xc(t) = A(t) Cos ((t)) • Quadrature component: xs(t) = A(t) Sin ((t)) • Define Bneq, the noise equivalent bandwidth