Download
1 / 3
70 likes | 257 Views
t. o. b. o. r. r. e. d. t. f. n. a. u. s. o. l. r. l. u. a. p. a. t. e. n. r. e. a. d. e. i. s. h. r. e. t. o. Surgical Assistant. s. R. m. t. c. u. Surgeon. e. t. s. e. Surgical . e. h. r. t. g. n. i. l. p. u. o. Resident. C. c. i.

E N D
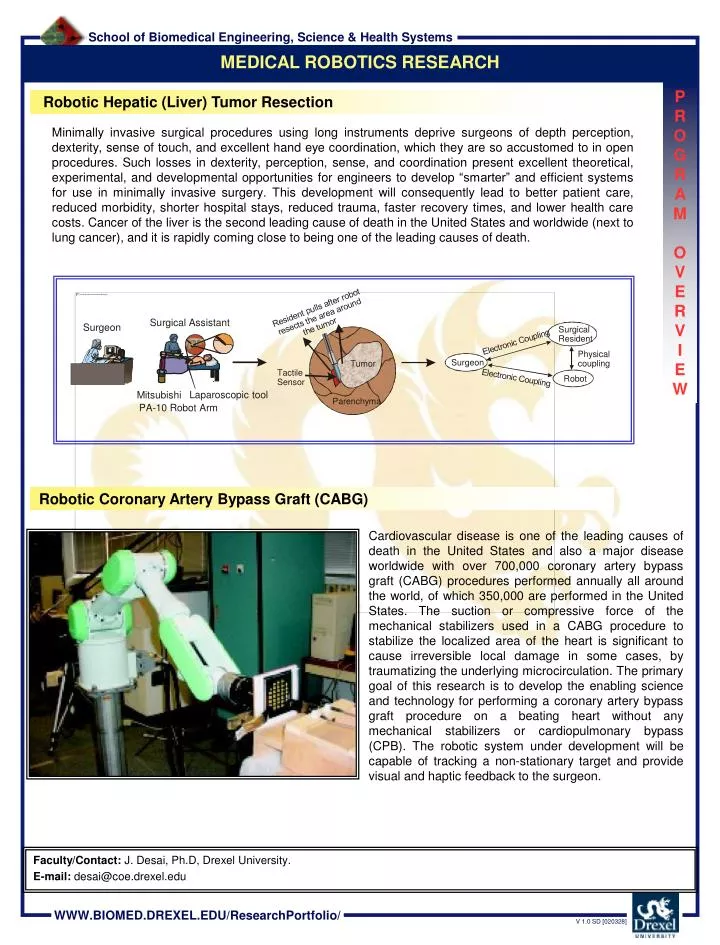
t o b o r r e d t f n a u s o l r l u a p a t e n r e a d e i s h r e t o Surgical Assistant s R m t c u Surgeon e t s e Surgical e h r t g n i l p u o Resident C c i n o r t c e l E Physical Surgeon coupling Tumor E Tactile l e c t r o n i c Robot C o u p l Sensor i n g Parenchyma Laparoscopic tool Mitsubishi PA-10 Robot Arm MEDICAL ROBOTICS RESEARCH P R O G R A M O V E R V I E W Robotic Hepatic (Liver) Tumor Resection Minimally invasive surgical procedures using long instruments deprive surgeons of depth perception, dexterity, sense of touch, and excellent hand eye coordination, which they are so accustomed to in open procedures. Such losses in dexterity, perception, sense, and coordination present excellent theoretical, experimental, and developmental opportunities for engineers to develop “smarter” and efficient systems for use in minimally invasive surgery. This development will consequently lead to better patient care, reduced morbidity, shorter hospital stays, reduced trauma, faster recovery times, and lower health care costs. Cancer of the liver is the second leading cause of death in the United States and worldwide (next to lung cancer), and it is rapidly coming close to being one of the leading causes of death. Robotic Coronary Artery Bypass Graft (CABG) Cardiovascular disease is one of the leading causes of death in the United States and also a major disease worldwide with over 700,000 coronary artery bypass graft (CABG) procedures performed annually all around the world, of which 350,000 are performed in the United States. The suction or compressive force of the mechanical stabilizers used in a CABG procedure to stabilize the localized area of the heart is significant to cause irreversible local damage in some cases, by traumatizing the underlying microcirculation. The primary goal of this research is to develop the enabling science and technology for performing a coronary artery bypass graft procedure on a beating heart without any mechanical stabilizers or cardiopulmonary bypass (CPB). The robotic system under development will be capable of tracking a non-stationary target and provide visual and haptic feedback to the surgeon. • Faculty/Contact:J. Desai, Ph.D, Drexel University. • E-mail: desai@coe.drexel.edu
t o b o r r e d t f n a u s o l r l u a p a t e n r e a d e i s h r e t o Surgical Assistant s R m t c u Surgeon e t s e Surgical e h r t g n i l p u o Resident C c i n o r t c e l E Physical Surgeon coupling Tumor E Tactile l e c t r o n i c Robot C o u p l Sensor i n g Laparoscopic tool Mitsubishi Parenchyma PA-10 Robot Arm Schematic of the liver tumor resection procedure using robotic assistance. ROBOTIC HEPATIC (LIVER) TUMOR RESECTION P R O J E C T O N E P A G E R Minimally invasive surgical procedures using long instruments deprive surgeons of depth perception, dexterity, sense of touch, and excellent hand eye coordination, which they are so accustomed to in open procedures. Such losses in dexterity, perception, sense, and coordination present excellent theoretical, experimental, and developmental opportunities for engineers to develop “smarter” and efficient systems for use in minimally invasive surgery. This development will consequently lead to better patient care, reduced morbidity, shorter hospital stays, reduced trauma, faster recovery times, and lower health care costs. Cancer of the liver is the second leading cause of death in the United States and worldwide (next to lung cancer), and it is rapidly coming close to being one of the leading causes of death. Each year, approximately 28,000 cases are diagnosed and almost as many patients die of advanced disease. The fundamental questions in haptics and vision answered through laparoscopic hepatic tumor resection will benefit other minimally invasive procedures performed in the following: a) kidney (laparoscopic renal resection); b) pancreas; and c) adrenals. Another advantage and purpose of research in this area is to develop an excellent learning tool for surgeons before they perform procedures on humans. The figure below shows a schematic of a surgeon and a robot working in conjunction during a liver tumor resection procedure. • Faculty/Contact: J. Desai, Ph.D., Drexel University. • E-mail: desai@coe.drexel.edu • Collaborating Researchers: W. Meyers, Ph.D., MCPHU; A. Castellanos, Ph.D., MCPHU; W. Wang, Ph.D., MCPHU. • Laboratories: The Program for Robotics, Intelligence Sensing, & Mechatronics (PRISM) Laboratory at Drexel University. • Funding: NSF Career Award
Haptic interaction with the deformable membrane based on deformation observed through the vision system. ROBOTIC CORONARY ARTERY BYPASS GRAFT (CABG) P R O J E C T O N E P A G E R Cardiovascular disease is one of the leading causes of death in the United States, and is also a major disease worldwide with over 700,000 coronary artery bypass graft (CABG) procedures performed annually all around the world, of which 350,000 are performed in the United States. The suction or compressive force of the mechanical stabilizers used in a CABG procedure to stabilize the localized area of the heart is significant enough to cause irreversible local damage in some cases by traumatizing the underlying microcirculation. The primary goal of this research is to develop the enabling science and technology for performing a coronary artery bypass graft procedure on a beating heart without any mechanical stabilizers or cardiopulmonary bypass (CPB). The robotic system under development will be capable of tracking a non-stationary target and provide visual and haptic feedback to the surgeon. This research will thus augment the capabilities of the surgeon while he or she is performing a CABG procedure on a beating heart. The CABG procedure on a beating heart using the robotic system brings forth several research problems, such as visual servoing on a deformable target, design and development of a kinematic mechanism for suturing on moving targets, and providing force feedback during the procedure to the surgeon. In the figure below, we are monitoring the deformation of a membrane in real-time through a pair of stereo cameras and haptically interacting with the membrane based on the forces computed using the material properties of the membrane and the deformation computed by the vision system. • Faculty/Contact: J. Desai, Ph.D., Drexel University. • E-mail: desai@coe.drexel.edu • Collaborating Researchers: Y. Kresh, Ph.D., Director of Cardiovascular Biophysics & Computing, MCPHU; A. Wechsler, Ph.D., Chair of Cardiothoracic Surgery, MCPHU. • Laboratories: The Program for Robotics, Intelligence Sensing, & Mechatronics (PRISM) Laboratory at Drexel University. • Funding: American Heart Association