Download
1 / 26
280 likes | 492 Views
Supervised learning network. G.Anuradha. Architecture. Earlier attempts to build intelligent and self learning systems using simple components Used to solve simple classification problems Used by Rosenblatt to explain the pattern-recognition abilities of biological visual systems.

E N D
Supervised learning network G.Anuradha
Architecture • Earlier attempts to build intelligent and self learning systems using simple components • Used to solve simple classification problems • Used by Rosenblatt to explain the pattern-recognition abilities of biological visual systems. Sensory Unit Associator Unit Response Unit Binary activation function Activation +1 0 -1
Quiz • Which of the features would probably not be useful for classifying handwritten digits from binary images? • Raw pixels from images • Set of strokes that can be combined to form various digits • Day of the year on which the digits were drawn • Number of pixels set to one
Perceptron networks-Theorysingle-layer feed forward networks • It has 3 units:, • input(sensory), • hidden(associator unit) • Output (response unit) • Input-hidden fixed weights -1,0,1 assigned at random, binary activation fn: • Output unit (1,0,-1) activation, binary step fn: with threshold θ • Output of perceptron is
Perceptron theory • Weight updation between hidden and output unit • Checks out for error between hidden and output layer • Error=target-calculated • weights are adjusted in case of error α is the learning rate, ‘t’ is the target which is -1 or 1. No error-no weight change-training is stopped
Single classification perceptron network x0 1 x1 X1 b w1 xi wi Xi y Y xn wn Xn
Perceptron training algo for single output classes • Step 0: initialize weights,bias,learning rate(between 0 and1) • Step 1: perform step 2-6 until final stopping condition is false • Step 2: perform steps 3-5 for each training pair indicated by s:t • Step 3: input layer is applied with identity activation fn: • xi=si • Step 4: calculate yin y=f(yin)
Perceptron training algo for single output classes • Step 5: Weight and bias adjustment: Compare the value of actual and desired(target) If y≠t else wi(new)=wi(old) b(new)=b(old) • Step 6: train the network until there is no weight change. This is the stopping condition for the network. If not met start from Step n2 EXAMPLE
Start Stop If weight changes Initialize weights and bias Set α (0 to 1) W(new)=w(old) B(new)=b(old) For each s:t If y!=t Y Activate input units Xi=si Calculate net input Apply activation function y=f(yin)
Perceptron training algo for multiple output classes • Step 0: Initialize the weights, biases, and learning rate suitably • Step 1: Check for stopping condition; if false then perform steps 2-6 • Step 2: Perform steps 3 to 5 for each bipolar or binary training vector pair s:t • Step 3: Set activation(identity) a each input unit i=1 to n xi=si
Perceptron training algo for multiple output classes • Step 4: calculate output response Activations are applied over the net input to calculate the output response
Perceptron training algo for multiple output classes • Step 5: Make adjustment in weights and bias for j=1 to m and i=1 to n If ti≠yj then else Step 6: Check for stopping condition. No change in weights then stop training process
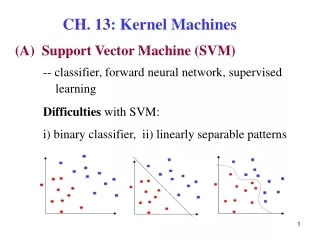
Linear separability • Perceptron network is used for linear separability concept. • Separating line is based of threshold θ • The condition for separating the response from region of positive to region of zero is w1x1+w2x2+b> θ • The condition for separating the response from region of zero to region of negative is w1x1+w2x2+b<- θ
What binary threshold neurons cannot do • A binary threshold output unit cannot even tell if two single bit features are the same! Positive cases (same): (1,1) 1; (0,0) 1 Negative cases (different): (1,0) 0; (0,1) 0 • The four input-output pairs give four inequalities that are impossible to satisfy:
A geometric view of what binary threshold neurons cannot do 1,1 0,1 • Imagine “data-space” in which the axes correspond to components of an input vector. • Each input vector is a point in this space. • A weight vector defines a plane in data-space. • The weight plane is perpendicular to the weight vector and misses the origin by a distance equal to the threshold. weight plane output =1 output =0 0,0 1,0 The positive and negative cases cannot be separated by a plane
Discriminating simple patterns under translation with wrap-around • Suppose we just use pixels as the features. • Can a binary threshold unit discriminate between different patterns that have the same number of on pixels? • Not if the patterns can translate with wrap-around! pattern A pattern A pattern A pattern B pattern B pattern B
Learning with hidden units • For such linear separability problem we require an additional layer called as hidden layer. • Networks without hidden units are very limited in the input-output mappings they can learn to model.. • We need multiple layers of adaptive, non-linear hidden units.
ADALINE • A network with a single linear unit is called an ADALINE (ADAptive LINear Neuron) • Input-output relationship is linear • Uses bipolar activation for its input signals and its target output • Weights between the input and output are adjustable and has only one output unit • Trained using Delta rule (Least mean square) or (Widrow-Hoff rule)
Architecture • Delta rule for Single output unit • Minimize the error over all training patterns. • Done by reducing the error for each pattern one at a time • Delta rule for adjusting the weight for ith pattern is (i=1to n) • Delta rule in case of several output units for adjusting the weight from ith input unit to jth output unit
Architecture x0=1 1 b x1 X1 w1 yin= x1wi f(yin) w2 x2 X2 wn yin xn Xn e=t-yin t O/p error generator Adaptive algorithm
Start Stop Y Initialize weights and bias and α If Ei=Es Input the specified tolerance error Es Calculate error Ei=Σ(t-yin)2 For each s:t Y Activate input units Xi=si Calculate net input Yin=b+Σxi wi
Madaline • Two or more adaline are integrated to develop madaline model • Used for nonlinearly separable logic functions (EX-OR) function • Used for adaptive noise cancellation and adaptive inverse control • In noise cancellation the objective is to filter out an interference component by identifying a linear model of a measurable noise source and the corresponding immeasurable interference. • ECG, echo elimination from long distance telephone transmission lines