Download
1 / 1
10 likes | 73 Views
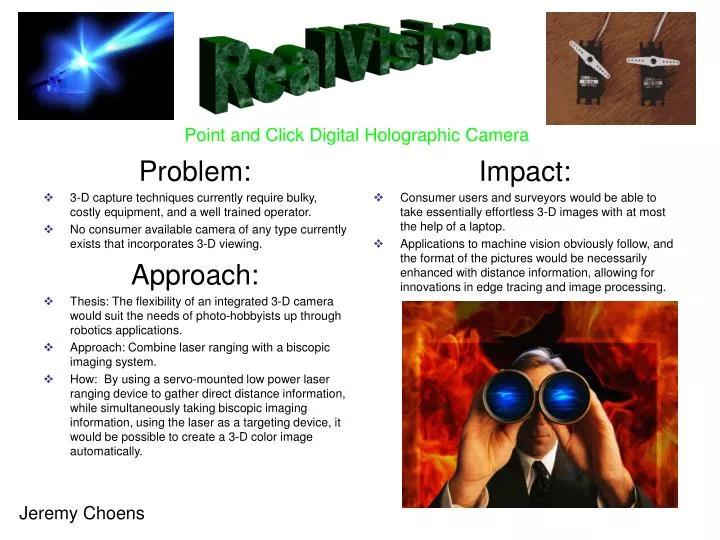
Current 3-D capture techniques are bulky and expensive, lacking consumer-friendly options. This thesis proposes an integrated 3-D camera using laser ranging and biscopic imaging, enabling easy 3-D image capture for various applications from hobbies to robotics. By combining a low-power laser ranging device for distance data and biscopic imaging, the camera automates 3-D color image creation. The impact of this technology would allow consumers and surveyors to effortlessly capture 3-D images, with potential applications in machine vision and enhanced image processing capabilities. The RealVision Point and Click Digital Holographic Camera designed by Jeremy Choens aims to revolutionize the way 3-D images are captured and processed, offering a user-friendly solution for various needs.

E N D
Problem: 3-D capture techniques currently require bulky, costly equipment, and a well trained operator. No consumer available camera of any type currently exists that incorporates 3-D viewing. Approach: Thesis: The flexibility of an integrated 3-D camera would suit the needs of photo-hobbyists up through robotics applications. Approach: Combine laser ranging with a biscopic imaging system. How: By using a servo-mounted low power laser ranging device to gather direct distance information, while simultaneously taking biscopic imaging information, using the laser as a targeting device, it would be possible to create a 3-D color image automatically. Impact: Consumer users and surveyors would be able to take essentially effortless 3-D images with at most the help of a laptop. Applications to machine vision obviously follow, and the format of the pictures would be necessarily enhanced with distance information, allowing for innovations in edge tracing and image processing. RealVision Point and Click Digital Holographic Camera Jeremy Choens