Download
1 / 1
10 likes | 186 Views
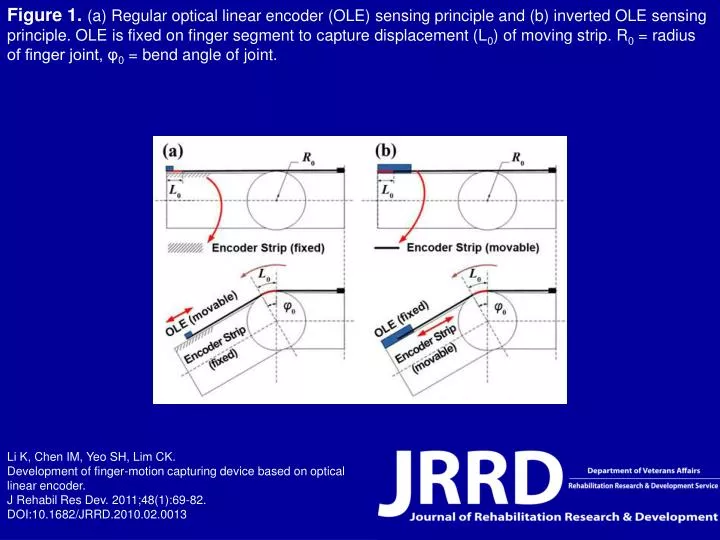
Figure 1. (a) Regular optical linear encoder (OLE) sensing principle and (b) inverted OLE sensing principle. OLE is fixed on finger segment to capture displacement (L 0 ) of moving strip. R 0 = radius of finger joint, φ 0 = bend angle of joint.

E N D
Figure 1. (a) Regular optical linear encoder (OLE) sensing principle and (b) inverted OLE sensing principle. OLE is fixed on finger segment to capture displacement (L0) of moving strip. R0 = radius of finger joint, φ0 = bend angle of joint. Li K, Chen IM, Yeo SH, Lim CK. Development of finger-motion capturing device based on optical linear encoder.J Rehabil Res Dev. 2011;48(1):69-82.DOI:10.1682/JRRD.2010.02.0013
