Download
1 / 41
410 likes | 430 Views
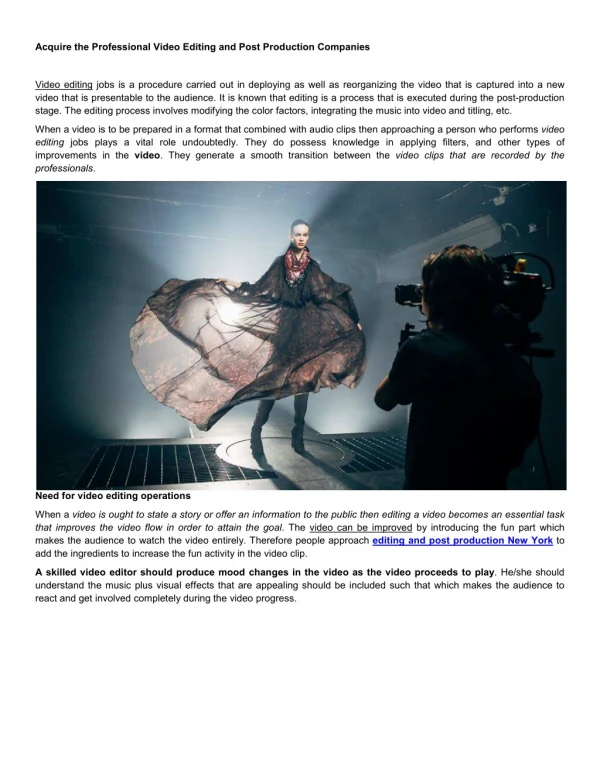
This project aims to enhance video processing in post-TV production by introducing new components like Bitmap I/O, Edge Detector, and Texture Mapper. The system includes a Graphical User Interface and can handle video reading & writing using DirectShow interfaces. The Video Mix Rendering 9 is utilized for real-time processing and rendering multiple videos simultaneously. The Texture Mapper wraps 3D objects with textures, enabling color and brightness adjustments. The project also explores cylindrical mapping for mapping different textures on cylinders.

E N D
Video Object Tracking and Replacement for Post TV Production LYU0303 Final Year Project Spring 2004
Outline • Brief project overview and targets achieved • New components added to the proposed system • Working principles of individual parts • Future work • Q & A
Overview • Post-TV productionprocesses and changes the content of a video clip • Difficult for computers to process video in a global view • Step-by-step programming enables the computer to “think” more thoroughly
Overview • We have introduced the following parts in the last semester: • Bitmap I/O • RGB <-> HSV converter • Edge detector • Edge equation finder • Translation detector • Texture mapper • New parts have been added in order to increase thefunctionality of the system
Additional Basic Components • The following parts have been added • Graphical User Interface (GUI) • Corner point finder • Video file reader and writer • Video player processor (frame-based) • Improved texture mapper • The following part has been modified • Bitmap I/O • Edge finder • Texture mapper • Removed Equation processor
Graphical User Interface • Although UI is not a main project part, a good GUI can significantly decrease the time needed for processing and program maintenance • Since C++ language is being used, the Microsoft Foundation Classes are adopted to develop the user interface • Provide most of the basic functions needed for information input and output
Corner Point Finder • As we know that processing dots are much faster than processing lines, we may wish to try to find the corner points directly before finding the edge equations • Stick some brightly coloured labels at the corners of the rectangular surface • Can apply on cylindrical objects as well to indicated the curve control points • A simple K-Means method is used to group the points together.
Corner Point Finder • In order to know the orientation of the mapped texture, we need to know which is the “first” point • For simplicity we just make the first point larger so that it contains more corner points than the others First point
Corner Point Finder Group No. of Member • We repeat the process until all the corner points has been processed • Points which are too far away from the main groups are discarded • Find out the centroids of the groups and move them out to give an estimation of corner positions 1 1 1 2 1 5 2 1 2 5 3 1 3 5 4 1 4 5
Video File I/O • As we are talking about video processing, it is inevitable to handle video reading and writing • DirectShow interfaces are being used in the project • Able to process any type of AVI video as long as the Window Media Player can play them
Video Player • We need to choose a video renderer that is suitable for our application • To reserve the function of real-time processing and video texture in the future, the Video Mixing Renderer 9 (VMR9) is used • Allows the rendering of more than one video or bitmap on the screen at the same time
Video Processor • Video are sequence of bitmap frames • We capture each video frame and process them in the same way as processing the bitmaps • After a video frame is being processed, we add them to an AVI file • Default video compressor is DivX Mpeg4 encoder (FourCC code “divx”)
Video Renderer Video System Structure
Texture Mapper • A graphics design technique used to wrap a surface of a 3-D object with a texture map • The 3-D object acquires a surface texture similar to the texture map. • Colors, brightnessvalues or altitudes
Texture Mapper Image coordinates Texture coordinates (r,c) (u,v) Mapping function
Scan-line conversion Scanline yk scanning order Scanline yk+1 • line by line • process each pixel on every line • last semester, we mapped cubes. How about this semester? for every line
Cylindrical mapping How to map this cylinder with different textures?
Cylindrical mapping • Mapping cylinders 3 parts: • Surface detection • Line scanning • Texture lookup + Orientation determination
Surface detection • Hough algorithm • to detect the two straight edges • four points are detected
Surface detection • Scanning from top to bottom • the scanning slope is orthogonal • yellow points are detected • by color transition
Surface detection • Model the curved edges by ellipses • x2 / a2 + y2 / b2= 1 • 2 ellipses are needed • rotational factor y x z
Scan-line mapping • Scan-line from left to right • Problem: How to determine the corresponding texture for each pixel, say p=(x,y) ? (x,y) y x z
Texture lookup • Rotate the cylinder to the upright position along z-axis • Translate the cylinder to (0,0) and determine the z coordinate p=(x’,y’,z’) • Rotate the along x-axis upright from viewpoint (0,0) y h x z
Texture lookup • Detect the marker which indicates where the texture starts • Look up the texture coordinate (u,v) by (y’+h/2)/h = v tan-1(x’/z’) / 2 = u y x z (u,v)
Cylindrical mapping After mapping the top we have : MAPPING MAPPED CYLINDER TEXTURES
Spherical mapping How to map this sphere with different textures?
Spherical mapping • Mapping spheres Also 3 parts: • Surface detection • Line scanning • Texture lookup + Orientation determination
Surface detection • Scan from 4 directions and get the boundary points • Determine center
Line scanning • Scan from left to right. • For each pixel p=(x,y), look up the texture by transforming it to the upright position (0,0) y Upright x z
Texture lookup • Translate to origin • Look up z-coordinate • Rotate the ball along z-axis • Rotate the ball along x-axis (x’,y’,z’) (5) (6) (0,0) y x z
Texture lookup • Lookup the texture by v = cos-1(y’/R) / u = (cos-1(x’/(R sin(v))) ) / (2)
Spherical mapping • After mapping: Mapped Sphere Texture
Shadow mapping • Mapping of surface brightness • Method: • Covert the image from RGB HSV • Modify the V (intensity) value • 5 types of shadow mapping
Shadow mapping • Mapping with texture brightness often unrealistic • Mapping with image brightness
Shadow mapping • Mapping with average brightness of the image more realistic • Mapping with other shadow maps (e.g. wood)
Shadow mapping • Transparency mapping (background information has to be obtained)
Problem with sphere mapping The texture is “squeezed” at the pole
Solution Modify the texture to this: Mapped sphere becomes: No distortion at pole