Download
1 / 8
90 likes | 260 Views
δ r B. δ r A. θ. 作业解析 1. 顶重装置中,。若在点 A 作用水平力 F ,试求当 AOB = θ 时所能顶起的重物重量 W 。. 解 : 本例中的约束为理想约束和双侧约束,自由度数 N =1 ,取广义坐标 q = θ 。虚位移原理表达式为. 解析法求解: 本例中的 θ 为一般角度,适宜于用解析法,将上式写成投影形式:. δ r B. δ r A. θ. 作业解析 1. 解析法求解: 本例中的 θ 为一般角度,适宜于用解析法,将上式写成投影形式:. 对上式等号两侧求变分,建立虚位移与广义坐 标之间的关系.

E N D
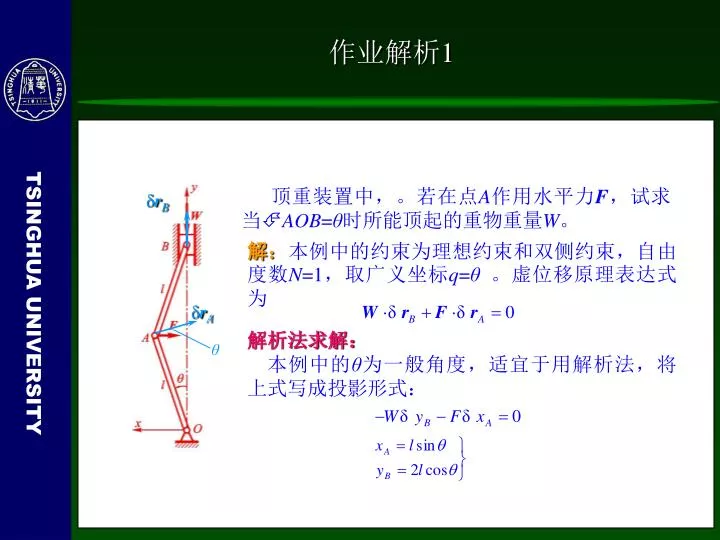
δrB δrA θ 作业解析1 顶重装置中,。若在点A作用水平力F,试求当AOB=θ时所能顶起的重物重量W。 解:本例中的约束为理想约束和双侧约束,自由度数N=1,取广义坐标q=θ。虚位移原理表达式为 解析法求解: 本例中的θ为一般角度,适宜于用解析法,将上式写成投影形式:
δrB δrA θ 作业解析1 解析法求解: 本例中的θ为一般角度,适宜于用解析法,将上式写成投影形式: 对上式等号两侧求变分,建立虚位移与广义坐 标之间的关系 由于θ≠0,式中带括号的项必为零。于是求得
δrB δrA θ 作业解析1 解:本例中的约束为理想约束和双侧约束,自由度数N=1,取广义坐标q=θ。虚位移原理表达式为 几何法求解: 画出A点的一组虚位移δrA,以及B点与δrA相对应的一组虚位移δrB。因为AB为刚体,所以,若δrA沿右上方,则δrB的方向必为铅垂向上。
δrB δrA θ 作业解析1 几何法求解 根据几何法的虚位移原理表达式,写出主动力(F,W)分别在上述一组虚位移(δrA,δrB)上的虚功
δrB δrA θ 作业解析1 几何法求解: 本例中的约束为定常约束。在此条件下,实位移是虚位移中的一组。例如本例的一组虚位移(δrA,δrB)就对应一组实位移(drA,drB)。这样,可以采用求解实位移的方法,确定不同质点虚位移之间的关系。
δrB δrA θ 作业解析1 几何法求解: 同时,根据运动学,点的实位移与其速度成正比,即drA=vAdt, drB=vBdt,因而,可以采用求解各点的速度关系的方法,确定定常约束关系中同一组虚位移中各点虚位移之间的关系。 于是,由A点与B点的速度vA与vB,可以确定出平面运动刚体AB的速度瞬心,以及δrA与δrB的数值关系
δrB δrA θ 作业解析1 几何法求解:
作业解析1 本例小结: 若采用静力学方法求解本例,则必须将系统拆开,这就必然出现未知的内约束力;而用虚位移原理求解,只需考虑整体系统,故在求解过程中不会出现与之无关的未知内约束力。 当用解析法将虚位移变换为广义坐标的变分,即δri=f(δqj) (i=1,2,…,n; j=1,2,…,N)之后,藉助于δqj的独立性,便能得到 不含虚位移的结果。这是引入广义坐标概念的重要意义之一。 本例已知平衡位置,求主动力之间关系。反之,如果由已知主动力之间的关系,也可以确定平衡位置。这表明,静力学所能解决的问题,虚位移原理都可以解决。
