Download
1 / 4
40 likes | 53 Views
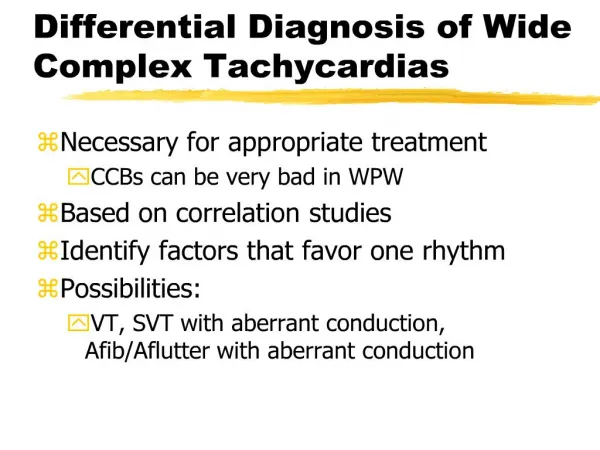
Develop distributed algorithm for reliable fault diagnosis in large complex systems. Utilize qualitative reasoning techniques to simplify diagnostic analysis. Partition faults and measurements to achieve complete diagnosis. Heuristics for algorithm approximation.

E N D
Towards Distributed Diagnosis of Complex Physical Systems Presented by- Gautam Biswas Jyoti Gandhe Xenofon D. Koutsoukos Sherif Abdelwahed
Motivation for Distributed Diagnosis • Large Scale , Complex Systems deployed in mission-critical and safety-critical applications should be reliable, dependable, available, and operationally robust. • Online Model based fault diagnosis with composed model of overall complex system makes diagnosis task computationally difficult • Hard to analyze complex nonlinearities online. Develop qualitative reasoning techniques to make diagnostic analysis computationally simpler and robust • Develop Distributed Diagnosis Algorithm so a large computationally expensive diagnosis task is decomposed into a set of smaller tasks that can be performed independently, thus reducing the overall complexity of online diagnosis.
Design of the distributed algorithm • We start with a set of possible faults in the system and a set of available measurements. • Our Goal - Distributed and Complete Diagnosis (i.e., all faults of interest should be uniquely identified) • Our Method- • Partition the set of faults into subsets such that we can construct non-interacting diagnosers for each subset. • Two diagnosers do not interact if they don’t share information in establishing unique, globally valid diagnosis results. • This will be true if fault subsets corresponding to the two diagnosers are independent i.e. they do not require the same set of measurements to achieve complete diagnosability.
Design of the algorithm • Establish measurements that uniquely distinguish a fault • Group faults to obtain maximum number of independent fault subsets [NP-Complete ]: • Heuristics of approximating algorithm – • Measurements with Discontinuities have the most discriminatory power for a fault • Add next fault to the ‘best’ partition for it • Best Partition is the one whose measurement set most overlaps with measurements that uniquely identify it and causes the least number of combinations with other partitions. • Complexity of the partition procedure - O (f * m4) f, m – Number of faults and measurements respectively