Download
1 / 26
260 likes | 743 Views
A Universal Background Subtraction Algorithm for Video Sequences. 作者 :Olivier Barnich and Marc Van Droogenbroeck 出處 :IEEE Transactions on image processing, VOL. 20, NO. 6, JUNE 2011. Outline. Introduction Review of background subtraction algorithms

E N D
A Universal Background Subtraction Algorithm for Video Sequences 作者:Olivier Barnich and Marc Van Droogenbroeck 出處:IEEE Transactions on image processing, VOL. 20, NO. 6, JUNE 2011
Outline • Introduction • Review of background subtraction algorithms • Description of a universal background subtraction technique: vibe • Experimental results
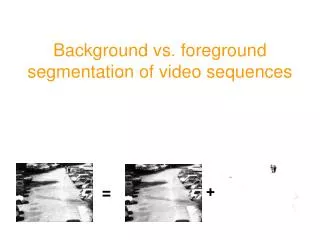
1. Introduction • 最基本的Background Subtraction就是在靜態的影像建立一個背景模型,讓目前影像每個pixel和背景模型相減。 • 背景相減應該要清除和移動物體無關的ghost。 • 靜態背景模型適合較短的室內影片,所以通常他只是用來了解場景的第一步。
2. Review of background subtraction algorithms • 高斯混合(Mixture of Gaussians)(MoG),不同於Kalman filter僅追蹤單一高斯分佈,MoG可以同時追蹤多個高斯分佈,由於MoG是參數式模型,所以不需另外的空間儲存一段影像資訊,而可以動態的更新背景模型的各個重要參數。 • Codebook 像素的碼本,是一個很長的圖像序列背景模型壓縮而成。每個碼本的碼字通過色彩誤差轉化而成。
3. Description of a universal background subtraction technique: vibe • background subtraction 主要有三個部分。 • 用甚麼當模型,模型是怎麼運作的。 • 模型初始狀態是怎麼樣。 • 模組是如何更新的。
3.1 Pixel Model and Classification Process • :N個背景模型的樣本。 • :在 點上取N個 pixel 的鄰居。 • 每個點會有N個色彩空間的樣本。
3.1 Pixel Model and Classification Process • : 定義一個圓形,半徑 R 中心在 。 • 如果大於閥值 則分類為背景。 • : 在 pixel 的 Euclideancolor space。
3.1 Pixel Model and Classification Process 一個pixel樣本在2-D Euclideancolor space(C1,C2)。
3.2Background Model Initialization From a Single Frame • 許多論文都需要一段時間初始化他們的模型。 • 許多應用都需要不斷的偵測前景,還有應付光線變化,能達到這兩件事就是要即時更新模型。 • 最好的方法就是使用單張影像就能初始化模型。
3.2Background Model Initialization From a Single Frame • : pixel x 空間上的鄰居。 • y 是 x 的鄰居。 • 這個方法唯一的缺陷就是如果移動物體在第一張影像就存在,就會產生ghost的問題,需要透過定期更新模組讓ghost淡化。
3.3Updating the Background Model Over Time • 更新的重點是背景模型中的樣本該保存多久,該怎麼被替換。 • 保守的更新 : 屬於前景的樣本絕對不會被更新到背景,這樣的更新方法會導致ghost永遠無法消除。 • 盲目的更新 : 樣本不確定是否為背景但更新到背景模型,這樣的更新如果有緩慢移動的物體會被歸類為背景。 • 本論文採取保守的更新。
3.3Updating the Background Model Over Time • 本論文更新機制分為三大重點 • Memoryless的更新方式,因為是採用機率刪除舊的背景模型。 • 隨機取樣,延長 time Window 在背景模型中。 • 不止取t時間的點當背景模型,也取空間上的點當背景模型。
3.3Updating the Background Model Over Time • 本論文不是系統的刪除舊的背景模型,而是根據機率密度函數刪除。
4. Experimental results • TP:true positives 正確偵測到前景 • FP:false positives 把背景分類到前景 • TN:true negatives 正確的分類背景 • FN:falsenegatives 前景分類到背景
A. Determination of Our Own Parameters PCCfor ranging from 1 to 20
A. Determination of Our Own Parameters Samples 多寡的PCC
B. Comparison With Other Techniques (a) Input image. (b) Ground-truth. (c) ViBe (RGB). (d) ViBe (gray). (e) Bayesian histogram. (f) Codebook. (g) EGMM. (h) GMM. (i)Gaussian model. (j) First-order filter. (k) Sigma-Delta Z.
B. Comparison With Other Techniques (a) Input image. (b) Ground-truth. (c) ViBe (RGB). (d) ViBe (gray). (e) Bayesian histogram. (f) Codebook. (g) EGMM. (h) GMM. (i)Gaussian model. (j) First-order filter. (k) Sigma-Delta Z.
B. Comparison With Other Techniques house各個方法的PCC(2.67GHz Core i7 CPU , 6GB of RAM , C implementation)
B. Comparison With Other Techniques pet各個方法的PCC(2.67GHz Core i7 CPU , 6GB of RAM , C implementation)
B. Comparison With Other Techniques 各個方法在640X480的圖像上執行效率。 (2.67GHz Core i7 CPU , 6GB of RAM , C implementation)
C. Faster Ghost Suppression • 快速的消除Ghost,假設framerate是30FPSΦ=1 只需要 2 秒就能消除, Φ= 64 需要 2分鐘。能消除Ghost是因為雜訊的關係。 • Bayesian histogram 對同樣的影像需要使用5秒的時間。
D.Resistance to Camera Displacements • 在移動的攝影機上做背景前景切割
D.Resistance to Camera Displacements • 在移動的監控攝影機上做背景前景切割。
E. Resilience to Noise (a) Input image. (b) ViBe (RGB). (c) ViBe (grayscale). (d) GMM (e) Codebook. (f) Bayesian histogram. (g) EGMM (h) Gaussian model. (i) First order filter. (j) Sigma-Delta Zipf.