Download
1 / 12
130 likes | 240 Views
Segmentation. Course web page: vision.cis.udel.edu/~cv. May 5, 2003 Lecture 30. Announcements . Read Forsyth & Ponce Chapters 14.5 and 15.1 on graph-theoretic clustering and the Hough transform, respectively, for Wednesday HW 5 due Friday

E N D
Segmentation Course web page: vision.cis.udel.edu/~cv May 5, 2003 Lecture 30
Announcements • Read Forsyth & Ponce Chapters 14.5 and 15.1 on graph-theoretic clustering and the Hough transform, respectively, for Wednesday • HW 5 due Friday • Class is at 4 pm on Friday due to Honors Day activities
Outline • Clustering basics • Methods • k-means clustering • Graph-theoretic clustering
Basic Approaches to Clustering • Unknown number of clusters • Agglomerative clustering • Start with as many clusters as tokens and selectively merge • Divisive clustering • Start with one cluster for all tokens and selectively split • Known number of clusters • Selectively change cluster memberships of tokens • Merging/splitting/rearranging stops when threshold on token similarity is reached • Within cluster: As similar as possible • Between clusters: As dissimilar as possible
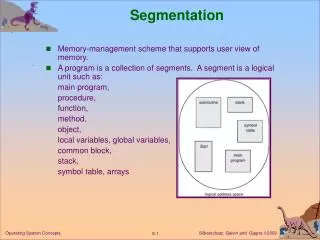
Feature Space • Every token is identified by a set of salient visual characteristics called features (akin to gestalt grouping factors). For example: • Position • Color • Texture • Optical flow vector • Size, orientation (if token is larger than a pixel) • The choice of features and how they are quantified implies a feature space in which each token is represented by a point • Token similarity is thus measured by distance between points (aka “feature vectors”) in feature space
k-means Clustering • Initialization: Given k categories, N points (in feature space). Pick k points randomly; these are initial cluster centers (means) ¹1, …,¹k. Repeat the following: • Assign all N points to clusters by nearest ¹i (make sure no cluster is empty) • Recompute mean ¹i of each cluster from Ci member points • If no mean has changed more than some ¢, stop • Effectively carries out gradient descent on
Example: 3-means Clustering from Duda et al. Convergence in 3 steps
Example: k-means Clustering from Forsyth & Ponce 4 of 11 clusters using color alone
Clustering vs. Connected Components • Connected components: • Agglomerative • Feature space is position (adjacency) • Tokens are pixels that have passed a similarity test with respect to an absolute standard (e.g., brightness, redness, motion magnitude) • k-means • Known number of clusters (but can be estimated adaptively) • Feature space is general • Tokens are general. The similarity test guiding cluster membership is relative—i.e., only between the points themselves courtesy of HIPR Connected components example
Example: k-means Clustering from Forsyth & Ponce 4 of 20 clusters using color and position
k-means Clustering: Axis Scaling • Features of different types may have different scales • E.g., pixel position on a 640 x 480 image vs. RGB color in range [0, 1] for each channel • Problem: Features with bigger scales dominate Euclidean metric • Solutions: Manually weight features or use Mahalanobis distance in objective function • Requires guarantee of more points in each cluster
Example: k-means Clustering for Tracking from B. Heisele et al.