Download
1 / 21
230 likes | 556 Views
Anti-slug control on a small-scale two-phase loop. Heidi Sivertsen and Sigurd Skogestad Departement of Chemical Engineering, Norwegian University of Science and Technology. Outline. Introduction Experimental set up Results anti-slug control Controllability analysis. Slug cycle. 1. 2.

E N D
Anti-slug control on a small-scale two-phase loop Heidi Sivertsen and Sigurd Skogestad Departement of Chemical Engineering, Norwegian University of Science and Technology
Outline • Introduction • Experimental set up • Results anti-slug control • Controllability analysis
Slug cycle 1 2 • Liquid build-up • Pressure buildup • Mass acceleration • Liquid fallback 4 3
Slug cycle Experiments performed by the Multiphase Flow Technology Laboratory, NTNU (prof. Nydal)
Why is riser slugging undesired? Slugging leads to: • Oscillation of separator level, bad separation and in some cases separator flooding. • Pressure oscillations cause wear and tear on equipment. • Unnecessary flaring. • Pressure variations can damage the reservoir. • Reduced production rate.
How to avoid riser slugging The traditional solutions have been to change the process either by changing the design: • Larger separator • Slug catchers • Other design changes Or by changing the operational conditions: • Increase separator pressure • Choking to increase riser pressure Slug catcher
How to avoid riser slugging • Now: control has become the way to handle the problem. Several tests ans implementations have been carried out: • Courbot (1996) • Havre, Stornes and Stray (2000) • Hedne and Linga (1990) • Sarica and Tengesdal (2000)
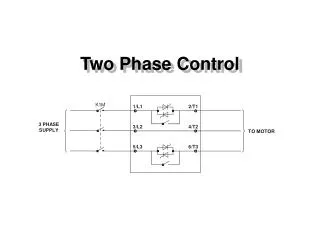
Experimental mini-loop Valve opening 100%
Experimental mini-loop Valve opening 25%
Experimental mini-loop Valve opening 15%
Experimental mini-loop: Storkaas 3-state model Bifurcation diagram Predicted smooth flow: Desirable but open-loop unstable No slug Slugging
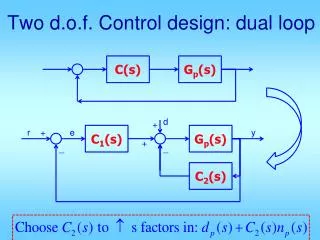
Use of feedback control to stabilize riser slugging With the use of a feedback loop we can change the dynamics of the system, making it stable where it would not be otherwise!
PC Feedback control using PI controller SP PI controller Gain= -2.5 bara-1 τI = 10s
Experimental vs theoretical results Controller on
PC Feedback control with topside measurements? SP Not reported
Controllability analysis using model Open loop poles of the system RHP poles! Skogestad and Postlethwaite: For complex RHP- poles, pRHP, each real RHP-zero, zRHP, of the system must approx. obey : zRHP > 2.3 * | pRHP| If not, the system is not stabilizable using feedback control.
FQ FW P2 ρ P1 Controllability analysis using model Requirement for stabilization: zRHP > 0.4 Requirement for performance: z >> 0 (both RHP and LHP zeros) Fig: Measurements and estimates available Zeros of the system for z = 0.25
Conclusion • Experimental loop analyzed using simple model • Simple PI controller using inlet pressure P1 stabilizes the flow. • Not possible using single topside measurement • Future work: Using only topside measurements - Cascade control configuration - H∞ controller
Acknowledgments • Experiments: M.Sc. student Ingvald Baardsen • Model: Ph.D. student Espen Storkaas • Finance: Statoil The Norwegian Research Council
References • Courbot (1996). Prevention of Severe Slugging in the Dunbar 16” Myultiphase Pipeline. Offshore Technology conference, May 6-9, Houston, Texas • Havre, Stornes and Stray (2000). Taming slug flow in pipelines. ABB review 4, 55-63. • Hedne and Linga (1990). Suppression of Terrein Sugging with Automatic and manual Riser Choking. Advances in Gas-Liquid Flows, pp 453-469. • Sarica and Tengesdal (2000). A new technique to eliminating severe slugging in pipeline/riser systems. SPE Annual Technical Conference and Exhibition, Dallas, Texas. SPE 63185. • Storkaas, Godhavn and Skogestad (2003). A low-dimentional model of severe slugging for controller design and analysis. MultiPhase’03, San Remo, Italy, 11-13 June 2003 • Skogestad and Posthletwaite (1996). Multivariable Feedback Control. John Wiley & Sons