Download
1 / 21
210 likes | 324 Views
Minimalistic Robot for Mapping and Coverage. Supervisors: Dr . Amir Degni Mr. Koby Kohai Students’ names: David Shallom Guy Greenhouse Date : 10/25/2012 Control and robotics laboratory. The Mission.

E N D
Minimalistic Robot for Mapping and Coverage Supervisors:Dr. Amir Degni Mr. Koby Kohai Students’ names:David Shallom Guy Greenhouse Date:10/25/2012 Control and robotics laboratory
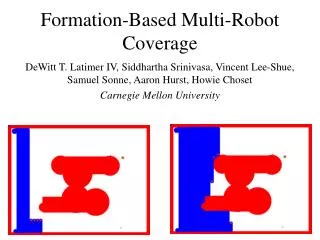
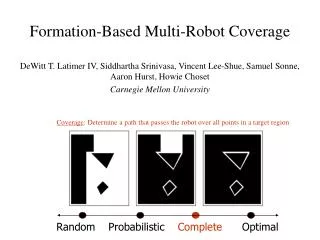
The Mission Mapping and reconstructing an unknown map, using a minimal amount of sensors.
So, how many sensors are required for this task? Let’s see how Roomba does it!
The project probably won’t save lives But for some, cleaning might be a nuisance.
Progress so Far Comprehensive market research. Formulation of three major algorithms. Development of a Matlab GUI simulator that can emulate the robot unique mechanism. Examination of linear and angular errors’ impact on the quality of coverage, and statistics collection. First steps towards creating the robot.
The Main Algorithms Algorithm 1 – simple trend-keeping movement. Algorithm 2 – partitioning the map into several connected convex hulls using a trend-shifting movement. Algorithm 3 – beginning with the second algorithm and after stabilizing – continuing with a random movement (Not implemented yet).
The Third Algorithm (Hypothesis) Random length Random angle
Simulation Results – Angular Error Angular error [%] Angular error [%] Angular error [%] Angular error [%] Angular error [%] Angular error [%] * Each point in the graph represents an absolute deference between the compared parameter averaged over 100 measurements.
Simulation Results – Linear Error Linear error [%] Linear error [%] Linear error [%] Linear error [%] Linear error [%] Linear error [%]
Simulation Challenges Numeric precision Being able to determine if a certain corner is convex or concave. When do we consider the job as done? Map reconstruction based on the robot’s memory trace. Maps and polygons’ comparison.
Robot Sketch Bump sensors
Practical Challenges The main challenge is to develop a reliable mechanism that matches the simulation and theory as much as possible. Learning how to interface with the Arduino. Creating a trusty error-immune system. Being able to compensate the lack of sensors with extra mechanism.
Plans for the Next Semester Implement the third algorithm in simulation. Dive into statistics collection over a larger database of unknown maps. Continue developing the robot. Configuring the Arduino micro-processor (“the brain of the robot”). Creating a relevant error model for the specific mechanism and updating that model in simulation. Writing an article for IEEE.