Download

1 / 32
330 likes | 421 Views
Real-Time, Reactive Planner for Aggressive 3D Aircraft Maneuvers. AIAA@Infotech 2012. Presented by: Dick Stottler stottler@StottlerHenke.com 650-931-2714. Overview. Problem Addressed Motivation High Level Context PRM Planner Design Maneuver Library Hand-Off/Hand-Back Criteria

E N D
Real-Time, Reactive Planner for Aggressive 3D Aircraft Maneuvers AIAA@Infotech 2012 Presented by: Dick Stottler stottler@StottlerHenke.com 650-931-2714
Overview Problem Addressed Motivation High Level Context PRM Planner Design • Maneuver Library • Hand-Off/Hand-Back Criteria • Milestone Selection Criteria Results/Scenarios Future/Current Work: Full-Scale Implementation Conclusions
Problem Addressed Close-in, unguided threats allow little reaction 60% Iraq/Afghanistan aircraft losses Hostile Fire Indicator detects RPG launches Other sensor systems detect other hostile fire But pilot only has a fraction of a second to react and reaction must be aggressive Often multiple simultaneous threats Other aircraft in formation; Popup obstacles Multiple simultaneous goals/objectives/priorities Future: manned/unmanned aircraft in formation
Motivation • Emergency situations call for extreme maneuvers • Hostile Enemy Fire • Collisions with other aircraft or objects • Maximum dynamic limits versus total lost • Pilot often otherwise engaged • Need short term path planner (PP) • Safe flight paths • But provide maximum deviation • A/C may automatically follow path or display for pilot • Future: increased hostile fire & fire detection systems • Automatic, aggressive maneuver PP natural complement • Also useful for UAV, including formation flying • Future attacking UAV, nap of earth flying, avoid detection
Prototype Path Planner (PP) Approach to Aggressive Aircraft PP Is Feasible 0.1 Seconds Returned Viable Plan < 2 feet error in predictions Maneuver Library required: aggressive/moderate Recorded from simulations with real pilots Can interpolate in between Can have variable time / constant attitude Readily applicable to different platforms PP Prototype solved every problem given to it
PP Prototype • Uses highly aggressive maneuvers • Produces Routes Several seconds Long • Always physically realizable • Avoid the static & (multiple) dynamic terrain • Respect aircraft structural & aerobatic limits • Stay within the allowed torque range • Maximize distance from likely multiple munition paths • Considers aircraft’s mission, role, environment • Large # simultaneous/sequential threats/issues
Maneuver Library • Stored with Each Maneuver: Applicability, Control Inputs over time, Resulting Attitude and Trajectory over time • Used to predict where the aircraft will be and when, if the maneuver is selected • Many maneuvers for diff. conditions • Effectively captures the expertise of the best pilots, with time to think, prepare, and do-over • Retrieves and instantly utilizes that expertise (the maneuver) in time-pressured emergency • Maneuvers can be semi-manually enhanced (edited)
Hand-Off / Hand-Back Criteria • PP takes over when a threat is sensed • Hands back control when: • No new threats • No remaining incoming objects • Helicopter is trim • No collision projected for at least 4 seconds • Typically controls for only a few seconds • Unless there is a series of separate shots
Unguided, Untracked Threats Helicopter’s Position, Velocity Vector, & Angle to Shot Define a Plane of likely trajectories for close in shots. (Longer shots tend to fall short) Side View From Behind From Above
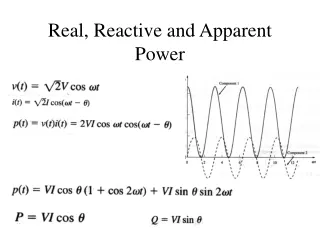
Milestone (m) Selection Criteria Score(p,v) = WS∙min(mini(di(p), T) + WE∙ΔE(p,v,p-1,v-1)+Sjnj(p)∙wj p: The position of the aircraft at the milestone v: The velocity of the aircraft at the milestone p-1: The position of the aircraft at the previous milestone. v-1: The velocity of the aircraft at the previous milestone. Di(p): The distance from p to threat i T: Threshold distance at we are considered safe and consideration shifts to other priorities ΔE(p,v,p-1,v-1): The change in energy from the state at t-1 to the state at t, as a ratio to kinetic energy E(p,v)=Ep(p)+Ek(v) Ep (p)=32.174⋅altitude(p) Ek (v)= (1/2)v2 nj(p) = number of threats/goals of type j (LOS) visible from p
Prototype Testing Based on ART’s FlightLab High fidelity OH-58D Kiowa Warrior model Sim. cockpit instruments & out the window display Video capture the OTW display and instruments Plot/Video the helo’s trajectory & munitions in 3D API for aircraft state data & control inputs Variety of different types of terrain FlightLab model obeys the aircraft constraints
Demonstrations Simple Shot Avoidance Popup Obstacles Terrain Avoidance Build-Up Base: 2 shots, under then over (terrain) + 1 Wire: under then under (wire above) + 2 Wires, another wire is ahead & below, can’t sink so climb (just enough, not too much) + 3 Wires: third wire blocks best maneuver so turn flat. (Not great, but no choice) 5 Sequential Shots Grand Finale: 12 shots at 5 times
Current Phase II System AH-64D Apache - Based on ART’s FlightLab (& TBD UAV) FlightLab model obeys the aircraft constraints Simulated cockpit instruments & out the window display – Desktop & Medium fidelity dome simulator Maneuver Library Building Software for pilots Video capture the OTW display and instruments Plot/Video the helicopter’s trajectory & munitions in 3D Plot control inputs and model outputs Automatically check important outputs (e.g. Gs and torque) Easily Adaptable to any Aircraft • Controls, Simulation Model, Maneuver Library • Interface to Perceptual System
Conclusions • PRM applicable to aircraft path planning • PRM PP can produce safe/aggressive paths within 0.1 second deadline • PRM PP always returned a valid route • (No matter how complex the scenario) • Easily adaptable to different aircraft