Download
1 / 1
30 likes | 211 Views
Towards a geometry factor for projection imaging WITH nonlinear gradient fields. Jason P. Stockmann 1 , Gigi Galiana 2 , Leo Tam 1 , and R. Todd Constable 1,2 Yale University, Department of Biomedical Engineering 1 , Department of Diagnostic Radiology 2 , New Haven, Conn., USA.

E N D
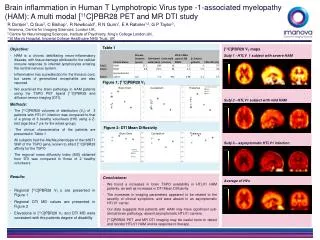
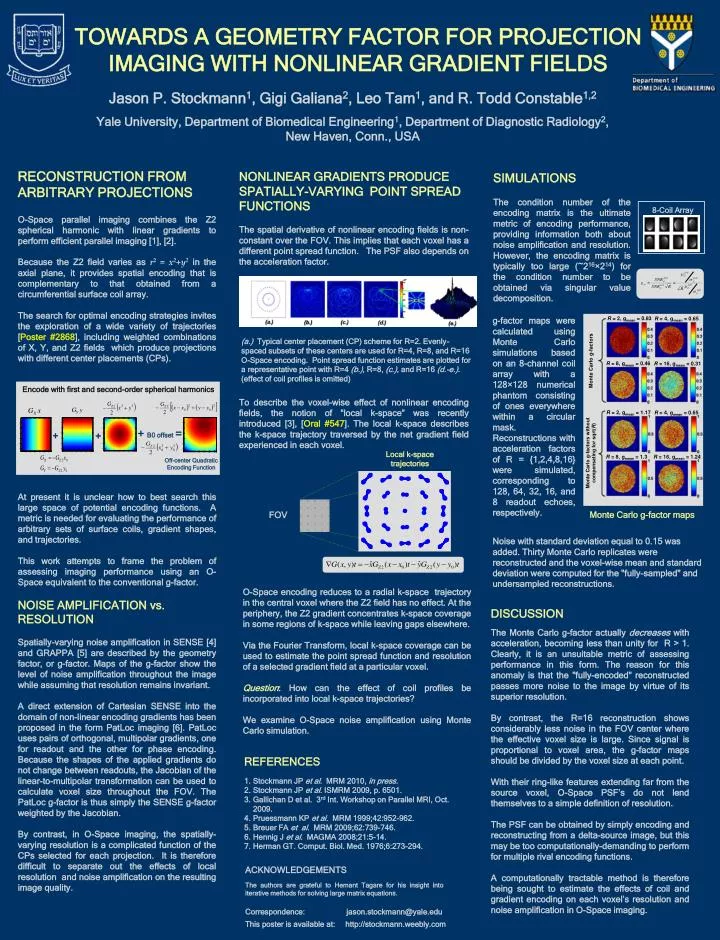
Towards a geometry factor for projection imaging WITH nonlinear gradient fields Jason P. Stockmann1, Gigi Galiana2, Leo Tam1, and R. Todd Constable1,2 Yale University, Department of Biomedical Engineering1, Department of Diagnostic Radiology2, New Haven, Conn., USA RECONSTRUCTION FROM ARBITRARY PROJECTIONS O-Space parallel imaging combines the Z2 spherical harmonic with linear gradients to perform efficient parallel imaging [1], [2]. Because the Z2 field varies as r2 = x2+y2in the axial plane, it provides spatial encoding that is complementary to that obtained from a circumferential surface coil array. The search for optimal encoding strategies invites the exploration of a wide variety of trajectories [Poster #2868], including weighted combinations of X, Y, and Z2 fields which produce projections with different center placements (CPs). At present it is unclear how to best search this large space of potential encoding functions. A metric is needed for evaluating the performance of arbitrary sets of surface coils, gradient shapes, and trajectories. This work attempts to frame the problem of assessing imaging performance using an O-Space equivalent to the conventional g-factor. NOISE AMPLIFICATION vs. RESOLUTION Spatially-varying noise amplification in SENSE [4] and GRAPPA [5] are described by the geometry factor, or g-factor. Maps of the g-factor show the level of noise amplification throughout the image while assuming that resolution remains invariant. A direct extension of Cartesian SENSE into the domain of non-linear encoding gradients has been proposed in the form PatLoc imaging [6]. PatLoc uses pairs of orthogonal, multipolar gradients, one for readout and the other for phase encoding. Because the shapes of the applied gradients do not change between readouts, the Jacobian of the linear-to-multipolar transformation can be used to calculate voxel size throughout the FOV. The PatLoc g-factor is thus simply the SENSE g-factor weighted by the Jacobian. By contrast, in O-Space imaging, the spatially-varying resolution is a complicated function of the CPs selected for each projection. It is therefore difficult to separate out the effects of local resolution and noise amplification on the resulting image quality. NONLINEAR GRADIENTS PRODUCE SPATIALLY-VARYING POINT SPREAD FUNCTIONS The spatial derivative of nonlinear encoding fields is non-constant over the FOV. This implies that each voxelhas a different point spread function. The PSF also depends on the acceleration factor. To describe the voxel-wise effect of nonlinear encoding fields, the notion of “local k-space” was recently introduced [3], [Oral #547]. The local k-space describes the k-space trajectory traversed by the net gradient field experienced in each voxel. SIMULATIONS The condition number of the encoding matrix is the ultimate metric of encoding performance, providing information both about noise amplification and resolution. However, the encoding matrix is typically too large (~216×214) for the condition number to be obtained via singular value decomposition. 8-Coil Array g-factor maps were calculated using Monte Carlo simulations based on an 8-channel coil array with a 128×128 numerical phantom consisting of ones everywhere within a circular mask. Reconstructions with acceleration factors of R = {1,2,4,8,16} were simulated, corresponding to 128, 64, 32, 16, and 8 readout echoes, respectively. R = 2, gmean = 0.83 R = 4, gmean = 0.65 (a.) Typical center placement (CP) scheme for R=2. Evenly-spaced subsets of these centers are used for R=4, R=8, and R=16 O-Space encoding. Point spread function estimates are plotted for a representative point with R=4 (b.), R=8, (c.), and R=16 (d.-e.). (effect of coil profiles is omitted) Monte Carlo g-factors R = 8, gmean = 0.46 R = 16, gmean = 0.31 Encode with first and second-order spherical harmonics R = 2, gmean = 1.17 R = 4, gmean = 0.65 + B0 offset= + + Monte Carlo g-factors without compensating for sqrt(R) Local k-space trajectories R = 16, gmean = 1.24 R = 8, gmean = 1.3 Off-center Quadratic Encoding Function Monte Carlo g-factor maps FOV Noise with standard deviation equal to 0.15 was added. Thirty Monte Carlo replicates were reconstructed and the voxel-wise mean and standard deviation were computed for the "fully-sampled" and undersampled reconstructions. O-Space encoding reduces to a radial k-space trajectory in the central voxel where the Z2 field has no effect. At the periphery, the Z2 gradient concentrates k-space coverage in some regions of k-space while leaving gaps elsewhere. Via the Fourier Transform, local k-space coverage can be used to estimate the point spread function and resolution of a selected gradient field at a particular voxel. Question: How can the effect of coil profiles be incorporated into local k-space trajectories? We examine O-Space noise amplification using Monte Carlo simulation. DISCUSSION The Monte Carlo g-factor actually decreases with acceleration, becoming less than unity for R > 1. Clearly, it is an unsuitable metric of assessing performance in this form. The reason for this anomaly is that the "fully-encoded" reconstructed passes more noise to the image by virtue of its superior resolution. By contrast, the R=16 reconstruction shows considerably less noise in the FOV center where the effective voxel size is large. Since signal is proportional to voxel area, the g-factor maps should be divided by the voxel size at each point. With their ring-like features extending far from the source voxel, O-Space PSF’s do not lend themselves to a simple definition of resolution. The PSF can be obtained by simply encoding and reconstructing from a delta-source image, but this may be too computationally-demanding to perform for multiple rival encoding functions. A computationally tractable method is therefore being sought to estimate the effects of coil and gradient encoding on each voxel’s resolution and noise amplification in O-Space imaging. • REFERENCES • Stockmann JP et al. MRM 2010, in press. • Stockmann JP et al. ISMRM 2009, p. 6501. • Gallichan D et al. 3rd Int. Workshop on Parallel MRI, Oct. 2009. • Pruessmann KP et al. MRM 1999;42:952-962. • Breuer FA et al. MRM 2009;62:739-746. • Hennig J et al. MAGMA 2008;21:5-14. • Herman GT. Comput. Biol. Med. 1976;6:273-294. ACKNOWLEDGEMENTS The authors are grateful to HemantTagare for his insight into iterative methods for solving large matrix equations. Correspondence: jason.stockmann@yale.edu This poster is available at: http://stockmann.weebly.com



![R. De Leo [1] , M. Mastromarco [1] , R. Perrino [2] [1] Universit à e INFN Bari [2] INFN Lecce](https://cdn3.slideserve.com/6144796/slide1-dt.jpg)