Download
1 / 13
140 likes | 316 Views
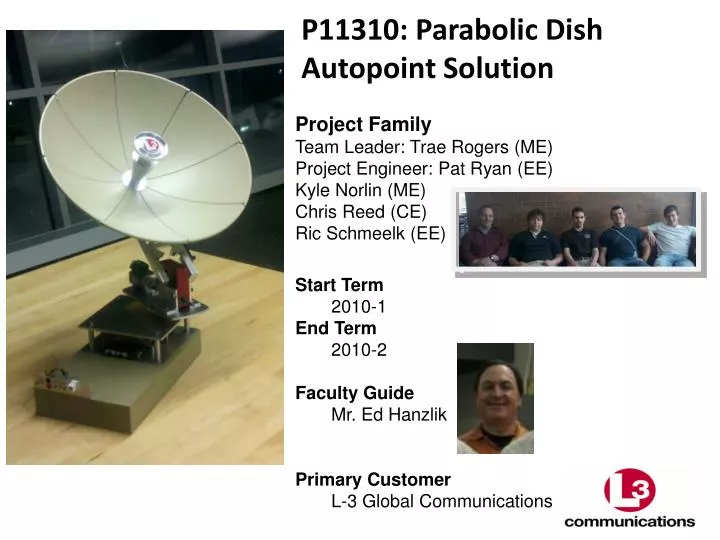
P11310: Parabolic Dish Autopoint Solution . Project Family Team Leader: Trae Rogers (ME) Project Engineer: Pat Ryan (EE) Kyle Norlin (ME) Chris Reed (CE) R ic Schmeelk (EE). Start Term 2010-1 End Term 2010-2 Faculty Guide M r. Ed Hanzlik Primary Customer

E N D
P11310: Parabolic Dish Autopoint Solution • Project Family • Team Leader: Trae Rogers (ME) • Project Engineer: Pat Ryan (EE) • Kyle Norlin (ME) • Chris Reed (CE) • RicSchmeelk (EE) • Start Term • 2010-1 • End Term • 2010-2 • Faculty Guide • Mr. Ed Hanzlik • Primary Customer • L-3 Global Communications
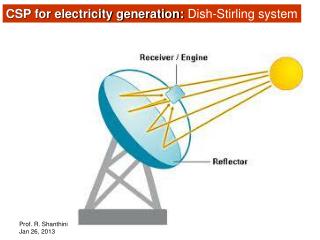
Project Description • Currently the L-3 manpack systems are manually pointed. The desired system is to have a geared mechanism that rotates the dish to point automatically. We have delivered a prototype that will support a 24” parabolic antenna that will point to a geosynchronous communication satellite. Interaction with the system is through an Ethernet connected laptop and requires minimal human interaction. This project has proven that this platform can be automated.
Concept Description and R ationale • Competitive Benchmarks • Generate Product Concepts • Customer Needs and Specs Limit Concept Ideas • Selection Matrix
Customer Needs/Specifications NEEDS • Portable • Low weight • Small size • Low power consumption • Usable setup time • High degree of pointing accuracy • Low cost • Test procedure to verify functionality • System Health Status • LEDs • Fault status • Movement status • Power status • Blackout mode • GUI • Fault status • Movement status • Power status • Level status • Robust design • SPECIFICATIONS • · 15 Lbs Max Weight • · 150 Watt Max • · 24 VDC Max • · 3 Minute Acquisition Time • · +/- 0.75° Pointing Accuracy • · $5000.00 Budget
Tests Azimuth & Elevation Test Azimuth Test
Current State of Design • Approx. 0.25 Degree Backlash in Elevation • Approx. 1.70 Degree Backlash in Azimuth • Full GUI Interaction and Integration • Approx. 16.75lbs • Max of 24VDC, 3 Amps, 72 Watts
Summary • What was asked: • Provide a robust autopoint solution which meets accuracy, SWAP requirements within budget, in an easy to use form. Pointing solution should be realized within a reasonable amount of time. • What we did: • Delivered a proof of concept within budget which meets elevation accuracy, size, and power requirements with a simple GUI. The system easily reaches maximum positions in minimal time. • Where we fell short: • Azimuth accuracy still a problem with regards to repeatability. • Weight slightly over requirements, but could be brought down. • Auto-correction of position based on sensor feedback. • Elevation actuation is physically noisy. • Fault light configuration
Where we fell short • Azimuth accuracy still a problem with regards to repeatability. • Key stock does not meet high enough tolerances through the gearbox • Gear ratio could be increased as well as physical size of gearbox • Stainless steel turntable mount could decrease friction • Weight slightly over requirements, but could be brought down. • Mechanical components could be improved to reduce weight • Auto-correction of position based on sensor feedback. • Verify sensors (encoder and inclinometer) • Change microcontroller code to handle position of the dish • Sensor Location • Elevation actuation is physically noisy. • Motor mount to lift motor off the turntable • Possibly optimize the acceleration and velocity of the motor • Look into servo motors • Fault light configuration • Microcontroller code needs to process the information for the LED’s
Overall Project Evaluation • Able to prove that an Autopoint Solution can be done at reasonable SWAP. • Good team experience. • R eal Life Scenarios • Customer needs/specs were satisfactorily met. • SUCCESS!
Opportunities/Suggestions • Always include a factor of safety. • Look into a real time OS for microcontroller operation. • Learn from your failures. • Integrated electrical system. • Larger Azimuth Gearbox • Consider Different Arm and Dish Design Structure
Thank You • QUESTIONS? • COMMENTS!