Download
1 / 17
170 likes | 440 Views
Using Vanishing Points to Correct Camera Rotation. Andrew C. Gallagher Eastman Kodak Company andrew.gallagher@kodak.com. Problem. An unintentionally tilted camera can negatively affect image appearance. Caused by lightweight cameras that are difficult to hold level.

E N D
Using Vanishing Points toCorrect Camera Rotation Andrew C. Gallagher Eastman Kodak Company andrew.gallagher@kodak.com Andrew C. Gallagher 1 CRV2005
Problem • An unintentionally tilted camera can negatively affect image appearance. • Caused by lightweight cameras that are difficult to hold level. • People prefer imageswhere the horizon is level. • Human can see as little at 1o tilt. Andrew C. Gallagher 2 CRV2005
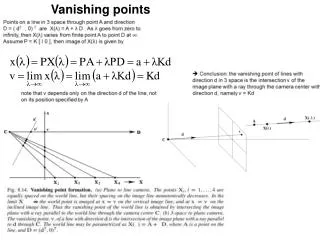
Solution • Vanishing point location can be used to detect and correct image tilt resulting from camera rotation. • A vanishing point is the image of a world line at infinity. • Vanishing point location is useful for: • computing focal length [Kanatani] • finding principal point [Caprile et al.] • determining camera parameters and rotation matrix[Cipolla et al.] Andrew C. Gallagher 3 CRV2005
Vanishing Points • Parallel scene lines meet at a vanishing point in the image. Vertical Line Vanishing Point Horizontal Line Vanishing Point Andrew C. Gallagher 4 CRV2005
The Camera Model • The camera model describes the projection of 3D world to 2D camera plane. • K is a 3x3 matrix of the internal camera parameters. • R is a 3x3 matrix describing the rotation from the world to the camera frame. • T is a 3x1 matrix describingtranslation between the world and camera coordinate frame. • Assume no skew, square pixels. The vanishing points of world directions are: world coordinate frame camera coordinate frame Andrew C. Gallagher 5 CRV2005
The Rotation Matrix • R is any matrix in the special orthogonal group SO(3). • In practice the camera positions used by typical consumers follow a fairly predictable nonlinear distribution. • This distribution is then used to find where vanishing points will occur. Andrew C. Gallagher 6 CRV2005
Camera Position Analysis World rotation by qabout the Y-axis Default Position World rotation by f about the X-axis World rotation about the Z-axisTILTED IMAGE Andrew C. Gallagher 7 CRV2005
Camera Position Analysis • This position model encompasses all “preferred” camera positions. • The vanishing point associated with vertical world direction (Y-axis) is constrained to fall on the image y-axis. • The horizon is parallel to image x-axis. Rotation about both X- and Y- axes Location of Vy Location of Vx or Vz Andrew C. Gallagher 8 CRV2005
Camera Position Analysis • The original rotation matrix is multiplied by a rotation about the Z-axis. • The new vanishing points are simply rotated by the same amount! • In essence, the rotation of the camera from the ideal position is equivalent to the rotation of the vanishing points. Additional rotation about the Z-axis Location of Vy Location of Vx or Vz Andrew C. Gallagher 9 CRV2005
Ground Truth Analysis • 357 vanishing points were manually labeled to compare with expected distribution. • 160 vertical (Vy) vanishing points197 horizontal (Vx or Vz) vanishing points. • The match is visually good. Location of Vy Location of Vx or Vz EXPECTED DISTRIBUTION MEASURED DISTRIBUTION Andrew C. Gallagher 10 CRV2005
Vanishing Point Classification • The vertical and horizontal vanishing point distributions are well-separated. • A classifier can be used to identify vertical vanishing points. • The camera rotation is found from the vertical vanishing point. • On ground truth, only 2vanishing points (0.6%)are misclassified. Vertical vanishing point classifier Andrew C. Gallagher 11 CRV2005
The Tilt Correction Algorithm • Find vanishing points • Identify vertical vanishing points • Compute camera rotation angle b from the vertical vanishing point • Compute correction angle bc according to table: • Rotate image • The rotated image can beshown to be equivalent to capturing with a camerahaving no componentof rotation about the Z-axis. ^ Andrew C. Gallagher 12 CRV2005
Vanishing Point Detection • Initial work by Barnard 1983. • Line Segment Detection • Lines are found by calculating local gradients, then clustering, or by using Hough transform. • Line Intersection Computation • Intersections of the lines are found. Line intersections are possible locations of a vanishing point. • Maximum Detection • A detected vanishing point is hypothesized to be at a location of many line intersections. Andrew C. Gallagher 13 CRV2005
Vanishing Point Detection Lines associated with 1st VP. Original Image Plot of all line segment Intersections (Higher probabilities are red). Detected Vanishing Points Lines associated with 2nd VP. Detected Line Segments Andrew C. Gallagher 14 CRV2005
Lines associated with vertical VP Algorithm Results Original Corrected Andrew C. Gallagher 15 CRV2005
Lines associated with vertical VP Algorithm Results Original Corrected Andrew C. Gallagher 16 CRV2005
Conclusions • Rotation of the camera about the principal axis moves the vertical vanishing point from the image y-axis. • This novel algorithm corrects a tilted image by detecting the vertical vanishing point, and determining the magnitude of camera rotation. Andrew C. Gallagher 17 CRV2005