Download
1 / 1
10 likes | 74 Views
Learn about mitigating systematic GPS errors through stochastic normalisation of observation geometry, enhancing accuracy and precision in time series data analysis.

E N D
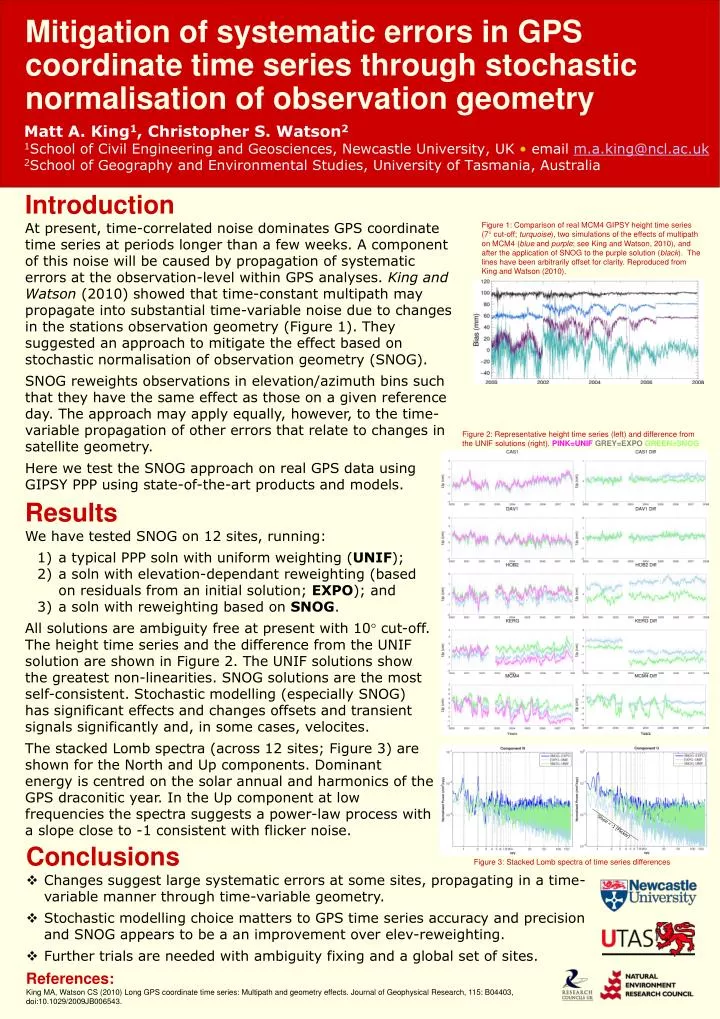
Mitigation of systematic errors in GPS coordinate time series through stochastic normalisation of observation geometry Matt A. King1, Christopher S. Watson21School of Civil Engineering and Geosciences, Newcastle University, UK •email m.a.king@ncl.ac.uk2School of Geography and Environmental Studies, University of Tasmania, Australia Introduction At present, time-correlated noise dominates GPS coordinate time series at periods longer than a few weeks. A component of this noise will be caused by propagation of systematic errors at the observation-level within GPS analyses. King and Watson (2010) showed that time-constant multipath may propagate into substantial time-variable noise due to changes in the stations observation geometry (Figure 1). They suggested an approach to mitigate the effect based on stochastic normalisation of observation geometry (SNOG). SNOG reweights observations in elevation/azimuth bins such that they have the same effect as those on a given reference day. The approach may apply equally, however, to the time-variable propagation of other errors that relate to changes in satellite geometry. Here we test the SNOG approach on real GPS data using GIPSY PPP using state-of-the-art products and models. Figure 1: Comparison of real MCM4 GIPSY height time series (7° cut-off; turquoise), two simulations of the effects of multipath on MCM4 (blue and purple; see King and Watson, 2010), and after the application of SNOG to the purple solution (black). The lines have been arbitrarily offset for clarity. Reproduced from King and Watson (2010). Figure 2: Representative height time series (left) and difference from the UNIF solutions (right). PINK=UNIFGREY=EXPOGREEN=SNOG Results We have tested SNOG on 12 sites, running: 1) a typical PPP soln with uniform weighting (UNIF); 2) a soln with elevation-dependant reweighting (based on residuals from an initial solution; EXPO); and 3) a soln with reweighting based on SNOG. All solutions are ambiguity free at present with 10° cut-off. The height time series and the difference from the UNIF solution are shown in Figure 2. The UNIF solutions show the greatest non-linearities. SNOG solutions are the most self-consistent. Stochastic modelling (especially SNOG) has significant effects and changes offsets and transient signals significantly and, in some cases, velocites. The stacked Lomb spectra (across 12 sites; Figure 3) are shown for the North and Up components. Dominant energy is centred on the solar annual and harmonics of the GPS draconitic year. In the Up component at low frequencies the spectra suggests a power-law process with a slope close to -1 consistent with flicker noise. Slope = -1 (Flicker) • Conclusions • Changes suggest large systematic errors at some sites, propagating in a time-variable manner through time-variable geometry. • Stochastic modelling choice matters to GPS time series accuracy and precision and SNOG appears to be a an improvement over elev-reweighting. • Further trials are needed with ambiguity fixing and a global set of sites. References: • King MA, Watson CS (2010) Long GPS coordinate time series: Multipath and geometry effects. Journal of Geophysical Research, 115: B04403, doi:10.1029/2009JB006543. Figure 3: Stacked Lomb spectra of time series differences






