Download
1 / 30
300 likes | 546 Views
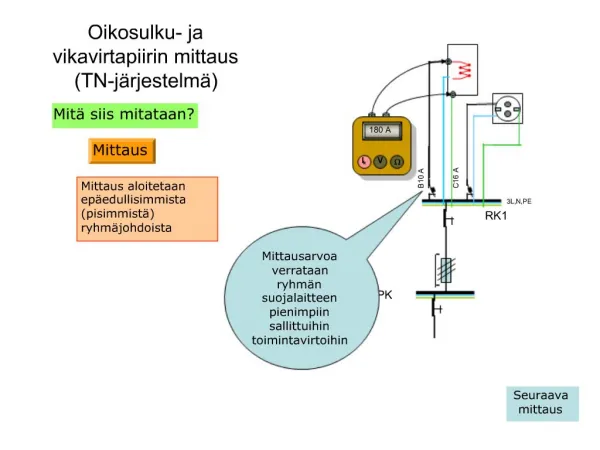
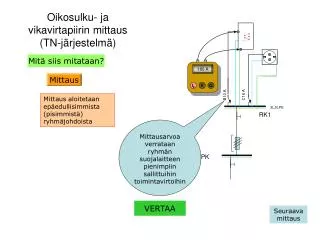
Mittaus. Mittaustulos, jonkun fysikaalisen suureen arvo tai arvojen joukko joissakin olosuhteissa Mittaustulos ei ole koskaan tarkka. Mittalaite vaikuttaa tulokseen. Mittauksen suunnittelu. näytteen valinta mittausalueen valinta, minkä funktiona,… toistomittaukset?

E N D
Mittaus • Mittaustulos, jonkun fysikaalisen suureen arvo tai arvojen joukko joissakin olosuhteissa • Mittaustulos ei ole koskaan tarkka. • Mittalaite vaikuttaa tulokseen.
Mittauksen suunnittelu • näytteen valinta • mittausalueen valinta, minkä funktiona,… • toistomittaukset? • laitteisto, laitteiden herkkyys, toiminta-alueet • tarvittava tarkkuus • siedettävä tilastollisten virheiden taso
Virhelähteet • systemaattiset virheet • tilastolliset virheet • laitevaikutus
Laitevaikutus • Esitettävissä usein integraaliyhtälönä g(x) = h(x,y) f(y) dy + n(x), missä f on tarkka tulos, h laitevaikutus (vaste, integraaliyhtälön kernel), n tilastollinen epävarmuus, g mittaustulos • Jos laitevaikutus sama joka pisteessä, konvoluutio g(x) = h(x-y) f(y) dy.
Laitevaikutuksen poisto on inversio-ongelma • integroinnin takia informaatiota puuttuu • ratkaisu ei yksikäsitteinen • ratkaisu voi olla herkkä pienillekin virheille • diskretisointiongelmia • Vaste kannattaa mitata kunnolla.
Tilastolliset virheet • Analyysissä mitattava suure tulkitaan satunnaismuuttujaksi. • Mittauksentulos elihavainto (observaatio) on tämän satunnaismuuttujan yksireaalisaatio (toteutuma).
Satunnaismuuttuja • Satunnainen suure eli satunnaismuuttuja saa eri arvoja todennäköisyyksillä, jotka määrittävät muuttujan jakauman. • Reaaliarvoinen satunnaismuuttuja on numeerinen suure, joka riippuu sellaisesta kokeesta, jonka lopputulos on satunnainen (satunnaiskoe). • Satunnaismuuttujan arvo on täysin määrätty,kun kokeen tulos (eli reaalisaatio) tunnetaan. • Satunnaismuuttujan arvo ei siis sinänsä ole mitenkään "satunnainen" tai"epämääräinen", mutta arvon määräytymisperusta on.
Satunnaismuuttuja • Matemaattisesti satunnaismuuttuja on kuvaustodennäköisyysavaruudelta reaaliluvuille.
Kertymäfunktio • Olkoon X reaaliarvoinen satunnaismuuttuja. • Sen kertymäfunktioksiFXsanotaan funktiota FX(y) = P(X y), missä P tarkoittaa satunnaismuuttujaan X liittyvää todennäköisyyttä. • Kertymäfunktion FX arvo pisteessä y R on todennäköisyys sille,että muuttuja X saa arvoa y pienemmän tai yhtäsuuren arvon.
Kertymäfunktio • Kertymäfunktio on koko reaaliakselilla määritelty positiivinen ja kasvavafunktio, jolle lisäksi pätee todennäköisyyden ominaisuuksien nojalla F(-) = 0 FX(y) 1 = F() • Huomaa, että kertymäfunktio ei välttämättä ole aidosti kasvava (eikä aidostipositiivinen).
Tiheysfunktio • Satunnaismuuttuja on jatkuva, jos sen kertymäfunktio on jatkuva. • Tiheysfunktio saadaan kertymäfunktion derivaattana: F´ = f .
Tiheysfunktiota kuvaavia parametrejä • momentit k = xk f(x) dx • keskeismomentit mk = (x- 1) k f(x) dx • odotusarvo 1 = xf(x) dx • varianssi m2 = (x- 1) 2 f(x) dx • Odotusarvoa merkitään usein Ex ja varianssia var(x).
Odotusarvo • keskimääräinen arvo • jatkuvalle jakaumalle 1 = xf(x) dx • Odotusarvo on lineaarinen E(aX+bY+c) = aEx+bEy+c
Varianssi • Varianssi on keskimääräinen neliöllinen poikkeama odotusarvosta eli satunnaismuuttujan (x-EX)2 odotusarvo. var(x) = E(x-Ex)2 = E(X2 - 2XEX + (EX)2) = EX2 - 2EXEX + (EX)2 =EX2 - (EX)2 Varianssi on hajonnan neliö.
Varianssi: epälineaarisuus • Varianssi EI ole lineaarinen! var(aX) = E(aX-aEX)(aX-aEX) = E(a2X2-2a2(EX)X-a2(EX)2) = a2 var(X)
Puoliarvonleveys Full Width at Half Maximum, FWHM • Puoliarvonleveys on järkevä suure vain yksihuippuiselle jakaumallef. • Sillä tarkoitetaan jakauman f leveyttä kohdassa, jossa sen arvotovat puolet maksimiarvosta max(f). • Puoliarvonleveysmääritetään yleensä numeerisesti.
Tasainen jakauma tiheysfunktio f(x) = 1/(b-a), axb f(x) = 0, muualla • Kertymäfunktio integroimalla F(X) = 0, x<a = (x-a)/(b-a), axb = 1, x>b • odotusarvo (a+b)/2, varianssi (b-a)2/12
Kovarianssi • Kahden satunnaismuuttujan X ja Y kovarianssi on cov(X,Y) = E(X-EX)(Y-EY) • Jos satunnaismuuttujat samat: cov(X,X) = var(X)
Korrelaatio • Normitettu kovarianssi c(X,Y) = cov(X,Y)/(cov(X,X)cov(Y,Y))1/2 • Jos satunnaismuuttujat X ja Y ovat tilastollisesti riippumattomia cov(X,Y) = 0. • Korrelaatiokerroin saa arvoja välillä –1…1
Kovarianssimatriisi • Tarkastellaan vektoria x, jonka komponentit ovat satunnaislukuja. cov(Xi,Xj) = E(Xi-EXi)(Xj-EXj) • Jos Xi riippumattomia, cov(x) on diagonaalinen. Lävistäjä sisältää komponenttien varianssit.
Lineaarinen kuvaus • vektorit x, y ja matriisi A reaalisia • y mittaustulos, sisältää tilastollisia virheitä. • Oletetaan x = Ay • Kysymys: mikä on vektorin x kovarianssi-matriisi, kun vektorin y kovarianssimatriisi tunnetaan?
Lineaarinen kuvaus x = Ay cov(x) = E((Ay-EAy)(Ay-Eay)t) = E(A(y-Ey)(y-Ey)tAt) = AE(y-Ey)(y-Ey)tAt = A cov(y) At
Tärkeitä jakaumia • Tasainen jakauma • Normaalijakauma (Gaussin funktio) N(,)
Satunnaislukuja Matlabilla • tasaisesti jakautuneet satunnaisluvut välillä (0,1) rand • normaalisti jakautuneet satunnaisluvut (odotusarvo 0, hajonta 1) randn Tiheysfunktio (normitusta vailla) hist
Matlabilla tasaisesti välille (a,b) jakautuneita satunnaislukuja • Generoidaan ensin välillä (0,1) tasaisesti jakautuneita satunnaislukujax. • Tehdään lineaarinen muunnos y = (b-a) x + a. • Matlab y = (b-a)*rand(n,1) + a
Simuloitu mittaustulos • Oletetaan, tulos noudattaa normaalijakaumaa. • tarkka data taulukossa yt, • simuloitu mittaustulos y = yt + randn(size(yt))*sigma
Virheen kasautumislaki • Tarkastellaan laskettua suuretta f(x,y), joka riippuu kahdesta mittaustuloksesta. • Mittaustulokset oletetaan satunnaismuuttujiksi. • var(f) = (f/x)2var(x) + (f/y)2var(y)
Tuloksen tarkkuuden ilmoittaminen • Mittaustuloksen tarkkuus määrää ilmoitustarkkuuden. • Koska arvioidun virheenkin suuruus on epävarma, sitä ei kannata ilmoittaa liian tarkasti. • Esimerkki. Tilavuus on 22 cm3 ja sen virhearvio 2 cm3. • Esimerkki. Jännite on 4.57 0.05 V.
Virhepylväät • Virhepylväitä muodostettaessa huomioidaan kaikki oleelliset virhelähteet, kuten mittalaitteiden lukematarkkuus ja tilastolliset virheet. • Jos ilmiössä on sen luonteesta johtuvaa tilastollista vaihtelua, tämä vaihtelu saattaa olla huomattavasti suurempaa kuin mittalaitteiden aiheuttama epävarmuus. • Jos tilastollinen hajonta on tiedossa ja jakauma on normaali, virhepylväät voisivat olla korkeudeltaan 3.Tällöin yli 99% arvoista arvoista osuu virhepylväiden sisään.
Esimerkki • Tarkastellaan normaalisti jakautuneita satunnaislukuja.Tarkista Matlabilla, kuinka suuri osa havainnoista osuu :n sisään? x=-10:0.1:10; mu=0; sig=0.5; f = exp(-((x-mu).^2)/2/sig.^2)/sqrt(2*pi*sig^2); l=find(abs(x)<=sig); trapz(x(l),f(l))/trapz(x,f) ans = 0.6811