Download
1 / 17
210 likes | 364 Views
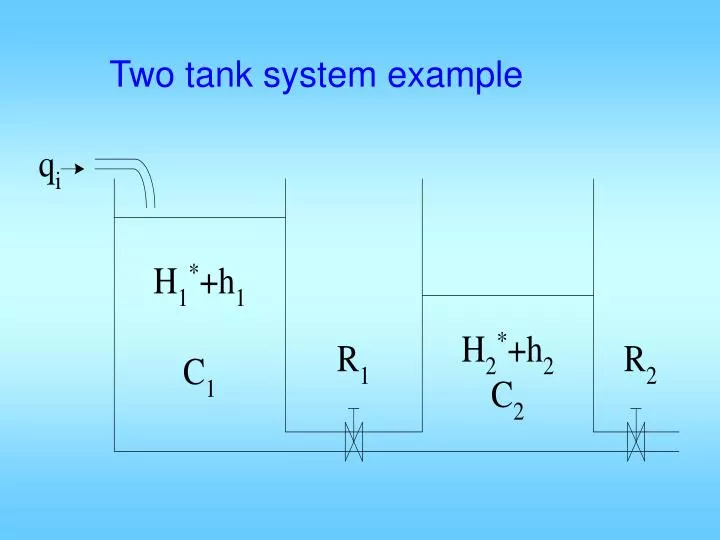
Two tank system example. In eq pt: all flow=same. 1. 3. 2. 4. Op Amp circuit example. Note: i p1 =0, ∴v p1 =v o =v A & v B =v p2 =0 Let v C1 & v C2 be s.v., v o output. KCL at A:. v o is not s.v. nor input, use v o =v C2. KCL at B:. 0. v o1 not s.v. nor input,

E N D
In eq pt: all flow=same 1 3 2 4
Op Amp circuit example Note: ip1=0, ∴vp1=vo=vA & vB=vp2=0 Let vC1 & vC2 be s.v., vo output.
KCL at A: vo is not s.v. nor input, use vo=vC2
KCL at B: 0 vo1 not s.v. nor input, vo1=vA+vC1=vn1+vC1 =vp1+vC1=vo+vC1 =vC2+vC1
Modeling • Types of systems electric mechanical electromechanical • Types of models I/O o.d.e. models Transfer Function state space models
I/O o.d.e. model: a d.e. involving input/output only. linear: where u: input y: output
State space model: linear: or in some text: where: u: input y: output x: state vector A,B,C,D, or F,G,H,J are const matrices
Other types of models: Transfer function model (This is I/O model) from I/O o.d.e. model, take Laplace transform:
Then I/O model in L.T. domain becomes: This is the T.F. model of the system. ∴T.F. or i.e. output L.T. is eq. to input L.T. with gain H(s) denote
State space model to T.F. / block diagram: s.s. Take L.T. : From sX(s)-AX(s)=BU(s) sIX(s)-AX(s)=BU(s) (sI-A)X(s)=BU(s) X(s)=(sI-A)-1BU(s) 1 2 1
2 into : Y(s)=C(sI-A)-1BU(s)+DU(s) Y(s)=[C(sI-A)-1B+D] U(s) H(s)= D+C(sI-A)-1B is the T.F. from u to y from 1
>> n=[1 2 3];d=[1 4 5 6]; >> [A,B,C,D]=tf2ss(n,d) A = -4 -5 -6 1 0 0 0 1 0 B = 1 0 0 C = 1 2 3 D = 0 >> tf(n,d) Transfer function: s^2 + 2 s + 3 --------------------- s^3 + 4 s^2 + 5 s + 6 • In Matlab: >> A=[0 1;-2 -3]; >> B=[0;1]; >> C=[1 3]; >> D=[0]; >> [n,d]=ss2tf(A,B,C,D) n = 0 3.0000 1.0000 d = 1 3 2