Download
1 / 22
220 likes | 336 Views
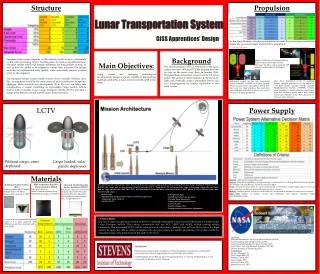
Lunar Exploration Transportation System (LETS). MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Phase 2 Presentation 3/6/08. Team Disciplines. The University of Alabama in Huntsville Team Leader: Matt Isbell

E N D
Lunar Exploration Transportation System (LETS) MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Phase 2 Presentation 3/6/08
Team Disciplines The University of Alabama in Huntsville Team Leader: Matt Isbell Structures: Matthew Pinkston and Robert Baltz Power: Tyler Smith Systems Engineering: Kevin Dean GN&C: Joseph Woodall Thermal: Thomas Talty Payload / Communications: Chris Brunton Operations: Audra Ribordy Southern University Mobility: Chase Nelson and Eddie Miller ESTACA Sample Return: Kim Nguyen and Vincent Tolomio
Agenda Abstract Phase 2 Overview Design Process Outline Concepts Subsystems of Concepts • Selection of Final Concept • Phase 3 Planning • Phase 3 Schedule • Conclusions • Questions
Abstract • Multifaceted and reliable design • System meets all CDD requirements • Two concepts developed in Phase 2 using the Viking Lander as a baseline • Each design assessed based on the specifications of the CDD • Both were assessed and ranked • The best design, Cyclops, was chosen to be carried into Phase 3 • Designs ranked by: ability to meet scientific objectives, weight, ease of design, ability of mobility, etc.
Phase 2 Overview • Deliverables • White paper • Compare baseline, the Viking Lander, with two alternative concepts • Strategy for selecting alternative systems • Qualitative and quantitative information to evaluate each idea • A logical rationale for selecting one concept from among the presented options • Oral presentation • SpecificationSummary • Lander and rover is required to meet the CDD requirements for the mission • The CDD requirements are the foundation for the lander/rover design • Each subsystem is also directly affected by the requirements and lunar environment
Phase 2 Overview Cont. • Approach to Phase 2 • Team Structure • Team Frankenstein is born • Team split up into separate disciplines • Concerns • Harsh lunar environment – Electrically charged dust, temperature, radiation, micro meteoroids, etc. • 15 Samples in permanent dark – Extreme temperature of -223 C • Mobility - non-existent on the baseline lander and LETS CDD requires mobility • Concept Design • Review baseline lander for detailed information about the customer’s specific requirement • Investigated possible solutions to meet the given CDD requirements • Each discipline presented design ideas to the team • Team revised these possibilities and created two design concepts • Evaluated the concepts based on the weighted values for desired criteria and chose the winning concept
Design Process Outline CDD/Customer Project Office Systems Engineer Structures Power Mobility Sample Return Payloads Operations GN&C Thermal System Simulation Results
Baseline Concept: Viking Lander • First robotic lander to conduct scientific research on another planet • Total Dry Mass: 576 kg • Science: 91kg (16% of DM) • Dimensions 3 x 2 x 2 m • Power: • 2 RTG • 4 NiCd • Survivability: -90 days expected -V1:6yrs 3mo -V2:3yrs 7mo
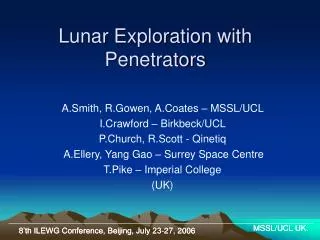
Alternative 1 Concept: Cyclops • Single rover landing on wheels • Total Dry Mass: 810.5 kg • Science: 320 kg (40% of DM) • Penetrators • SRV • Single site box • Dimensions 2 x 1.5 x 1 m • Power: • 8 Lithium Ion Batteries • 2 Radioisotope Thermoelectric Generators (RTG) • Solar Cells • Survivability: At least 1 yr
Alternative 2 Concept: Medusa • Stationary lander with rover deployment • Total Dry Mass: 932.8 kg • Science: 195 kg (21% of DM) • Penetrators • Dimensions 2 x 1.5 x 1 m • Rover 1 x 0.5 x 0.5 m • Power: • 8 Lithium Ion Batteries • 3 Radioisotope Thermoelectric Generators (RTG) • Survivability: At least 1 yr
Guidance & Navigation • Viking • Guidance, Control, and Sequencing Computer utilized the flight software to perform guidance, steering, and control from separation to landing • Cyclops • Decent/Landing • An altitude control system will be used to control, navigate, and stabilize while in descent • Post Landing • Operator at mission control navigating rover • Uses a camera system to obtain terrain features of its current environment • Rover orientation will be accomplished by a technique known as Visual Localization • Uses a camera image to determine its change in position in the environment • Medusa • Decent/Landing • An altitude control system will be used to control, navigate, and stabilize while in descent • Post Landing • Ground command inputs to the rover will be provided by onboard planning • Autonomous Path Planning will be used to navigate the rover • Uses a camera system to obtain terrain features of its current environment • Rover orientation will also be accomplished by Visual Localization
Communications • A UHF antenna will provide surface communications for the Lander/Rover • Communications to mission control will be done by medium gain S-Band antennas on the lander/rover
Structures • Viking • Used a silicon paint to protect the surfaces from Martian dust • Structural frame used lightweight aluminum • Cyclops • Six wheeled rover • Structural frame built from Aluminum 6061-T6 • Lightweight properties • Low cost • Composites • Carbon fiber, phenolic, etc. • Excellent thermal insulation • Excellent strength to weight ratio • Lower density • Medusa • Four legged lander • Deployed six wheel rover • Structural frame built from Aluminum 6061-T6 • Composites
Power • Viking • Bioshield Power Assembly (BPA), Power Control and Distribution Assembly (PCDA), Nickel Cadmium batteries, RTG, and Load Banks • Cyclops • PCDA • Load Banks • 8 Lithium Ion Batteries • Best energy to weight ratio • Slow loss of charge • 2 RTG • Constant power supply • Thermal output can be utilized for thermal systems • Solar cells for single site box • Medusa • PCDA • Load Banks • 8 Lithium Ion Batteries • 3 RTG • One RTG is needed for Medusa’s rover
Thermal • Viking • Thermal insulations and coatings, electrical heaters, thermal switches, and water cooling • Cyclops • 2 RTG • Each RTG will deliver a maximum of 7200 W of heat • Multi-Layer Insulation • Lightweight • Multiple layers of thin sheets can be added to reduce radiation • Marshall Convergent Coating-1 (MCC-1) • Forms a radiant heat barrier on surfaces that are painted • Medusa • 3 RTG • Multi-Layer Insulation • Marshall Convergent Coating-1 (MCC-1)
Payload • Gas Chromatography-Mass Spectrometry • Multi-spectral Imager • Miniature Thermal Emission Spectrometer • Single site box • Penetrators
Operations • Upon reaching the Moon • Decent • CONOPS takes over 5km from lunar surface • Upon decent, shoot 15 penetrators into permanently dark regions of the moon • Dark regions in the Shackleton crater • Landing • Drop off “sample box” for single site goals • Micrometeorite flux • Lighting conditions • Assess electrostatic dust levitation and its correlation with lighting conditions • Have 14 days of guaranteed light conditions • Lunar Surface Mobility • Have rover move to the rim of the Shackleton crater • Have the penetrators relay the data to the rover • The rover will send the data to LRO • Send data from LRO to mission control • Visit lit regions and collect samples • Relay data to mission control via LRO • The lander will relay the information to the LRO when not in direct line of site with mission control • The sample return vehicle will take a sample and send it back to Earth
Phase 3 Planning • Key Issues to Address • TRL of 9 vs. New Technology • Penetrators • Meets all challenges • Design basis is new • Expectations • Provide innovative ideas that meet or exceed the base requirements set out by the team • Partner Tasks • ESTACA • Sample Return Vehicle • Southern University • Mobility
Phase 3 Schedule • Subsystems • Each subsystem must develop a unique design that best fits the requirements for the chosen concept • Design Critical systems • Con-ops • Reliant on subsystems to provide direction for daily tasks • GN&C • Reliant on subsystems to provide basis for equipment needed • System Integration • Systems will be reviewed for feasibility • Compromises will be made on each design to create the most beneficial product
Conclusions • The best design Cyclops • “There’s no place this thing can’t go” • Provide superior functionality and reliability • Develop innovative and cutting edge ideas and designs to overcome the objectives • Concerns of penetrator use and trajectory