Download
1 / 1
10 likes | 191 Views
Motion and Motion Boundary Estimation by Probabilistic Inference on a Hierarchical Graph Xuming He, Shuang Wu, Alan Yuille Dept. of Statistics, UCLA. (1) (2) (3) (4). Experiments. Key Ideas. Data energy for velocity u : Robust to motion boundaries -- adaptive windows “M”.

E N D
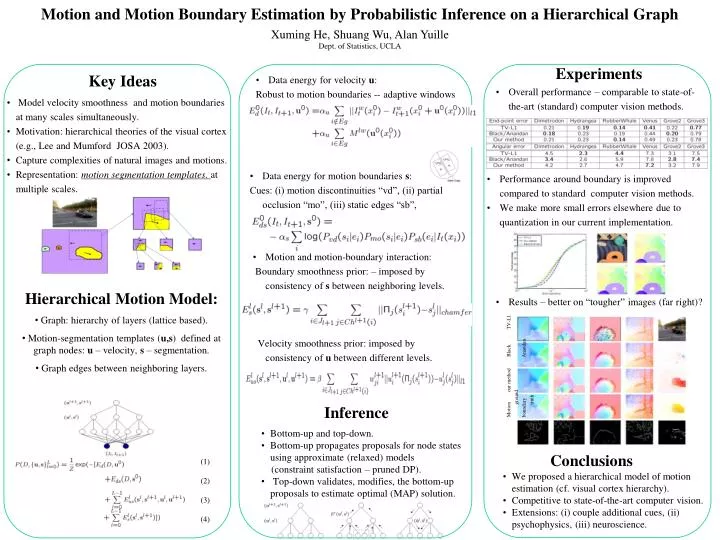
Motion and Motion Boundary Estimation by Probabilistic Inference on a Hierarchical Graph Xuming He, Shuang Wu, Alan Yuille Dept. of Statistics, UCLA (1) (2) (3) (4) Experiments Key Ideas • Data energy for velocity u: • Robust to motion boundaries -- adaptive windows “M” • Overall performance – comparable to state-of-the-art (standard) computer vision methods. • Model velocity smoothness and motion boundaries at many scales simultaneously. • Motivation: hierarchical theories of the visual cortex (e.g., Lee and Mumford JOSA 2003). • Capture complexities of natural images and motions. • Representation: motion segmentation templates. at multiple scales. • Data energy for motion boundaries s: • Cues: (i) motion discontinuities “vd”, (ii) partial occlusion “mo”, (iii) static edges “sb”, • Performance around boundary is improved compared to standard computer vision methods. • We make more small errors elsewhere due to quantization in our current implementation. • Motion and motion-boundary interaction: • Boundary smoothness prior: – imposed by consistency of s between neighboring levels. • Velocity smoothness prior: imposed by consistency of u between different levels. • Hierarchical Motion Model: • Graph: hierarchy of layers (lattice based). • Motion-segmentation templates (u,s) defined at graph nodes: u – velocity, s – segmentation. • Graph edges between neighboring layers. • Results – better on “tougher” images (far right)? Motion our method Black . TV-L1 ground boundary Anandan truth Inference • Bottom-up and top-down. • Bottom-up propagates proposals for node states using approximate (relaxed) models • (constraint satisfaction – pruned DP). • Top-down validates, modifies, the bottom-up proposals to estimate optimal (MAP) solution. Conclusions • We proposed a hierarchical model of motion estimation (cf. visual cortex hierarchy). • Competitive to state-of-the-art computer vision. • Extensions: (i) couple additional cues, (ii) psychophysics, (iii) neuroscience.