Download
1 / 1
10 likes | 182 Views
鳥取大学 工学部 機械工学科 計測制御工学研究室. UAV 姿勢制御用後置静翼の開発. 研究背景. ・近年利用されているUAV(自律無人飛行機)をさらに小型化で安定性の高いものを作成したい ・ UAV の中でもヘリコプタに注目した. 小型化への改良点として,テールムーブに変わる新たなる反トルク機構の開発を行った.. 開発装置製作の際の考慮点. ラジコンヘリ(ベンチャー90)がモデル 装置全体での固有振動数が 30Hz 以上 ホバリング状態を模擬するため、 地面効果を減少 6軸方向( Fx , Fy , Fz , Mx , My , Mz )の力 , トルクを測定できる

E N D
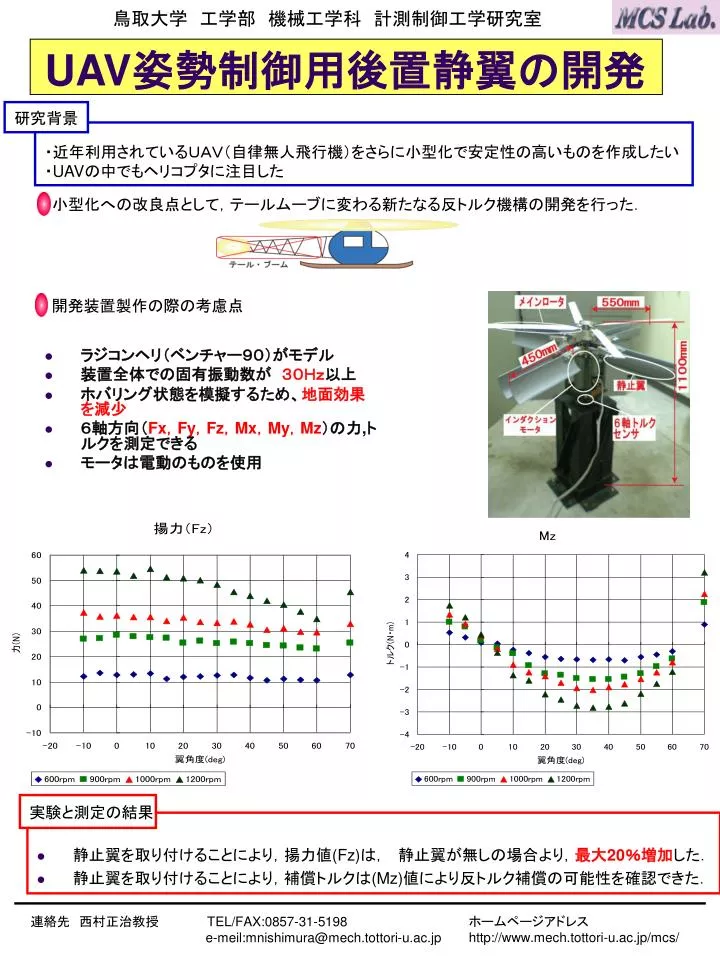
鳥取大学 工学部 機械工学科 計測制御工学研究室鳥取大学 工学部 機械工学科 計測制御工学研究室 UAV姿勢制御用後置静翼の開発 研究背景 ・近年利用されているUAV(自律無人飛行機)をさらに小型化で安定性の高いものを作成したい ・UAVの中でもヘリコプタに注目した 小型化への改良点として,テールムーブに変わる新たなる反トルク機構の開発を行った. 開発装置製作の際の考慮点 • ラジコンヘリ(ベンチャー90)がモデル • 装置全体での固有振動数が 30Hz以上 • ホバリング状態を模擬するため、地面効果を減少 • 6軸方向(Fx,Fy,Fz,Mx,My,Mz)の力,トルクを測定できる • モータは電動のものを使用 実験と測定の結果 • 静止翼を取り付けることにより,揚力値(Fz)は, 静止翼が無しの場合より,最大20%増加した. • 静止翼を取り付けることにより,補償トルクは(Mz)値により反トルク補償の可能性を確認できた. 連絡先 西村正治教授 TEL/FAX:0857-31-5198 e-meil:mnishimura@mech.tottori-u.ac.jp ホームページアドレス http://www.mech.tottori-u.ac.jp/mcs/
