Download
1 / 1
10 likes | 120 Views
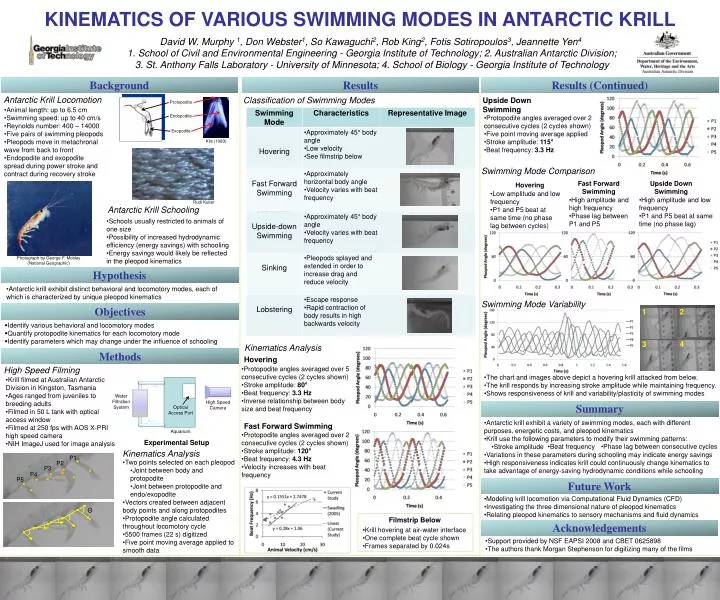
KINEMATICS OF VARIOUS SWIMMING MODES IN ANTARCTIC KRILL. David W. Murphy 1 , Don Webster 1 , So Kawaguchi 2 , Rob King 2 , Fotis Sotiropoulos 3 , Jeannette Yen 4 1. School of Civil and Environmental Engineering - Georgia Institute of Technology; 2. Australian Antarctic Division;

E N D
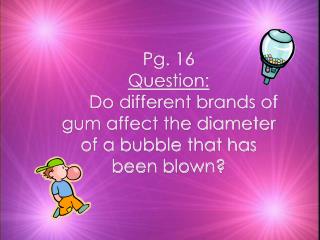
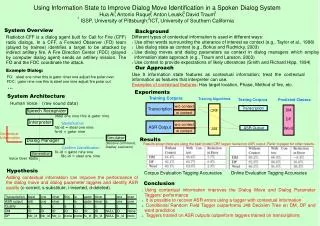
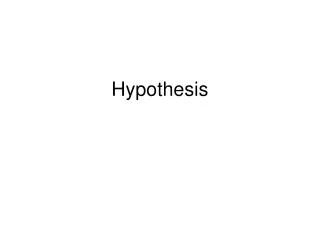
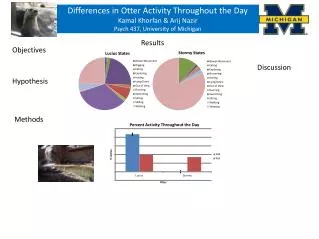
KINEMATICS OF VARIOUS SWIMMING MODES IN ANTARCTIC KRILL David W. Murphy 1, Don Webster1, So Kawaguchi2, Rob King2, Fotis Sotiropoulos3, Jeannette Yen4 1. School of Civil and Environmental Engineering - Georgia Institute of Technology; 2. Australian Antarctic Division; 3. St. Anthony Falls Laboratory - University of Minnesota; 4. School of Biology - Georgia Institute of Technology Background Results Results (Continued) Antarctic Krill Locomotion Water Filtration System Classification of Swimming Modes Upside Down Swimming Protopodite High Speed Camera Optical Access Port • Animal length: up to 6.5 cm • Swimming speed: up to 40 cm/s • Reynolds number: 400 – 14000 • Five pairs of swimming pleopods • Pleopods move in metachronal wave from back to front • Endopodite and exopodite spread during power stroke and contract during recovery stroke Endopodite • Protopodite angles averaged over 2 consecutive cycles (2 cycles shown) • Five point moving average applied • Stroke amplitude: 115° • Beat frequency: 3.3 Hz Exopodite Aquarium Kils (1983) Swimming Mode Comparison Fast Forward Swimming Upside Down Swimming Hovering • Low amplitude and low frequency • P1 and P5 beat at same time (no phase lag between cycles) • High amplitude and high frequency • Phase lag between P1 and P5 • High amplitude and low frequency • P1 and P5 beat at same time (no phase lag) Rudi Kuiter Antarctic Krill Schooling Hovering: Forward Swimming: • Schools usually restricted to animals of one size • Possibility of increased hydrodynamic efficiency (energy savings) with schooling • Energy savings would likely be reflected in the pleopod kinematics Photograph by George F. Mobley (National Geographic) Hypothesis • Antarctic krill exhibit distinct behavioral and locomotory modes, each of which is characterized by unique pleopod kinematics Swimming Mode Variability Objectives 1 2 • Identify various behavioral and locomotory modes • Quantify protopodite kinematics for each locomotory mode • Identify parameters which may change under the influence of schooling 3 4 Kinematics Analysis Methods Hovering • Protopodite angles averaged over 5 consecutive cycles (2 cycles shown) • Stroke amplitude: 80° • Beat frequency: 3.3 Hz • Inverse relationship between body size and beat frequency High Speed Filming • The chart and images above depict a hovering krill attacked from below. • The krill responds by increasing stroke amplitude while maintaining frequency. • Shows responsiveness of krill and variability/plasticity of swimming modes • Krill filmed at Australian Antarctic Division in Kingston, Tasmania • Ages ranged from juveniles to breeding adults • Filmed in 50 L tank with optical access window • Filmed at 250 fps with AOS X-PRI high speed camera • NIH ImageJ used for image analysis Summary • Antarctic krill exhibit a variety of swimming modes, each with different purposes, energetic costs, and pleopod kinematics • Krill use the following parameters to modify their swimming patterns: • Stroke amplitude • Variations in these parameters during schooling may indicate energy savings • High responsiveness indicates krill could continuously change kinematics to take advantage of energy-saving hydrodynamic conditions while schooling Fast Forward Swimming • Protopodite angles averaged over 2 consecutive cycles (2 cycles shown) • Stroke amplitude: 120° • Beat frequency: 4.3 Hz • Velocity increases with beat frequency Experimental Setup • Beat frequency • Phase lag between consecutive cycles Kinematics Analysis P1 • Two points selected on each pleopod • Joint between body and protopodite • Joint between protopodite and endo/exopodite • Vectors created between adjacent body points and along protopodites • Protopodite angle calculated throughout locomotory cycle • 5500 frames (22 s) digitized • Five point moving average applied to smooth data P2 P3 P4 P5 Future Work • Modeling krill locomotion via Computational Fluid Dynamics (CFD) • Investigating the three dimensional nature of pleopod kinematics • Relating pleopod kinematics to sensory mechanisms and fluid dynamics Filmstrip Below Acknowledgements • Krill hovering at air-water interface • One complete beat cycle shown • Frames separated by 0.024s • Support provided by NSF EAPSI 2008 and CBET 0625898 • The authors thank Morgan Stephenson for digitizing many of the films • Financial Θ