Download
1 / 25
260 likes | 470 Views
Fault-Tolerant Mechanism for Hierarchical Branch and Bound Algorithm. N. Melab and E-G. Talbi {melab,talbi}@lifl.fr. Bendjoudi ahcene.bendjoudi @gmail.com. U niversité A / M ira de B éjaïa CE ntre de R echerche sur l’ I nformation S cientifique et T echnique CERIST.

E N D
Fault-Tolerant Mechanism for Hierarchical Branch and Bound Algorithm N. Melab and E-G. Talbi {melab,talbi}@lifl.fr • Bendjoudi • ahcene.bendjoudi@gmail.com Université A/Mira de Béjaïa CEntre de Recherche sur l’Information Scientifique et Technique CERIST Laboratoire d’InformatiqueFondamentale de Lille
Outline • Motivations • FTH-B&B: Fault Tolerant hierarchical Branch and Bound algorithm • Performance Evaluation • Conclusion and Perspectives
Motivations • Combinatorial Optimization Problems are Np-Hard and CPU-Intensive • Their exact resolution requires a huge amount of computing resources • Branch and Bound B&B algorithms are the best known methods • Implicit enumeration of the search space • They use a pruning technique to reduce the search space however they remain not sufficient for very large instances • High performance computing (Computational Grids) • Computational Grids offer large amount of computing resources Issue: Scalability • Traditional Master/Worker-based B&B (MW-B&B) algorithms are inefficient • Master process becomes rapidly bottleneck Solution: Hierarchical Master/Worker-based B&B (HMW-B&B) 8
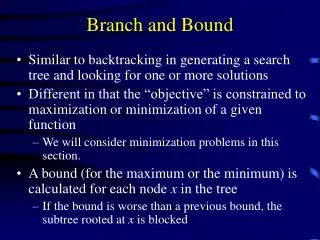
Branch and Bound Algorithm • Branching • Original problem is partitioned into smaller sub problems. • Bounding • Compute the estimated optimal solution (lower bound) of the considered problem and compare to the best known solution (upper bound). • Elimination • Identify nodes which don’t lead to The best solution and eliminate them • Selection • Exploration strategy (best first search, depth first search, best bound,…) P0 Problem to be solved Selection Branching Sub-problem Elimination 8 Solutions Optimal solution
Motivations • Resources of computational grids are highly unreliable and volatile Issue: Fault-tolerance Fault tolerance at middleware level: ProActive, XtremWeb, Condor, … They are costly in terms of execution time Solution: Application level fault-tolerant algorithm Fault detection • Task recovery • Minimization of Redundant work • Maintenance of the hierarchy
Outline • Motivations • FTH-B&B: Fault Tolerant Hierarchical Branch and Bound algorithm • Architecture • Work management with task recovery • Maintenance of the hierarchy • Distributed checkpointing • Performance Evaluation • Conclusion et Perspectives
Architecture • Based on HMW paradigm dealing with Scalability & Fault tolerance • Several FT MW-B&Bs organized hierarchically into groups • Each FT MW-B&B is composed of: • Single Master (on the top and inner nodes of the hierarchy): parallel recursive branching • Workers (Leaves): parallel exploration or Masters (inner nodes): parallel branching • Each master owns a single work pool Multiple work pools Collegial strategy Multiple work pools Masters Group of masters and workers Fault Tolerant M/W-based B&Bs Workers
Fault detection • A master heartbeats its workers • Workers heartbeat their master Master Heartbeats Workers
Work management & task recovery • Each master manages: • A list of assigned sub-problems (mapping between the assigned sub-problem and the child process assigned to it) • A list of branched sub-problems LBS (sub-problems being explored by its children) • When a failure is detected only the unexplored sub-problems of the lost root problem in the LBS are rescheduled to another safe process PB PC PD PA Work pool List of branched sub-problems LBS R PA B A PA2 PA1
3-phase communication mechanism • Phase 1 (between a master and its children): • A master assigns a problem to its children • It receives back the branched sub-problems • Phase 2 (between a master, its children, and its parent): • A master updates explored sub-problems in the LBS each time a child finishes the exploration of its sub-problem. • the master knows at any time the unexplored parts of a given problem. • Phase 3 (between a master and a new free process): • When a process fails • The parent of the failed process detects its failure and saves the unexplored part of its sub-problem • When a new safe process connects, the parent reschedules it the unexplored part of the sub-problem PB PC PD PA Connection of a new worker R PA B A PA1 PA2
Maintenance of the hierarchy • Motivations • Failures can cause a loss of data and/or computing power • Master’s failures can isolate some parts of processes from the rest of the hierarchy and cause orphan branches • Loss of processes can cause unsafe execution of the algorithm (non termination, redundant work, ...) • Failures can unbalance the hierarchy if only the parent of the failed processes is involved in the fault recovery process • New bottlenecks can be created on parts of the hierarchy • Proposed techniques • Simple connection to Ascendants SCA • Master Election ME • Balanced Hierarchy BH
Simple connection to Ascendants (SCA) • Children of the failed master connect to the closest safe ascendant • Each process holds the list of its ascendants • No process reassignment • When a process receives a connection from an orphan process, it considers it as a new child Drawback: • Risk of creation of new bottlenecks • If f children fail, the safe master receives gxf connections from its grandchildren • If l levels of masters fail, it receives gl+1 connections • Convergence to MW-B&B
Master Election (ME) • Orphan processes elect a new master among them using the bully algorithm • The new selected master considers the other electors as its children • It connects to its closest safe ascendant using SCA • It is informed by its new parent about its neighbors
Balanced Hierarchy (BH) • Orphan processes migrate to a safe sub-B&B • The migration strategy respects the maximum group size threshold • Assigns orphan processes to a non-full sub-B&B • A master receiving orphan processes: • Holds them only if the group it manages is non-full • Otherwise, it dispatches them among its children • Avoids the convergence to a MW
Distributed Checkpointing • Several levels of checkpointing • Each sub-MW-B&B performs distributed checkpointing independently • There is no global backup file and each master handles its own local backup file • A master saves unexplored sub-problems and updates its file each time a new sub-problem is explored. • A new considered master checks the buck-up file • Reconstitutes the unexplored sub-problems • Carries on the last consistent global state. Masters Clusters Workers Backup Files
Performance Evaluation (Objectives) • Evaluate the ability of FTH-B&B to deal with Fault Tolerance issue • Measure the efficiency of FTH-B&B in terms of execution time • Measure the benefit of task recovery on FTH-B&B in terms of minimizing the redundant work • Measure the impact of failures on the hierarchy of FTH-B&B using (SCA, ME, and BH)
Performance Evaluation (Environment) • FTH-B&B has been experimented on the Flowshop Scheduling Problem FSP (Taillard instances) • Application developed on top of the ProActive middleware • GRID’5000 : https://www.grid5000.fr • Between 1900 and 8900 processes have been deployed • To obtain deeper hierarchy, several processes have been deployed on a same host and the size of the sub-B&Bs is fixed to 10 • Failures are obtained killing processes chosen uniformly during their lifetime
The Flow-Shop Scheduling Problem M1 M2 M3 • N jobs to be scheduled on M machines • Each machine can not be simultaneously assigned to two jobs (colors) • Jobs (colors) must be scheduled in the same order on all machines • One objective must be minimized • Cmax: Makespan (Total completion time) 4 jobs on 3 machines
Efficiency of FTH-B&B • Efficiency = ratio between the exploration time and the total execution time including Idle times. • Idle time = communication time + 3-phase time + management time • 3-phase mechanism is not costly in terms of execution time • 3-phase consumes between 0,20% – 0,40% of the total execution time • The workers of FTH-B&B spend on average 98,92% of their time solving sub-problems
Minimizing Redundant work • The masters of FTH-B&B reschedule less sub-problems when using 3-phase mechanism less redundant work • On average when using the 3-phase mechanism the algorithm is 6,36 times more efficient.
Maintenance of the hierarchy using SCA • The figure presents the four most loaded masters in the hierarchy • Degree of a process = number of children • x-axis = Time • y-axis = degree of masters • Degrees increase with the number of failed processes • The root-master process rapidly becomes a bottleneck (passes from 10 children at the beginning of the execution to 1368 children at the end) Convergence to MW paradigm
Maintenance of the hierarchy using ME • The masters are less loaded than compared with SCA • When a new master is designated, it receives the highest identifier it will not be designated in the next election session. • Nevertheless, the average number of children has doubled after the failure of 25% of processes.
Maintenance of the hierarchy using BH • The figure shows the average degree masters in each level of the hierarchy • Up to 8 masters are killed every 1 second • The whole masters resist to the failures and do not become bottlenecks • The root masters maintains the same degree during all the lifetime • The degrees decreases softly for the 3 first levels and more rapidly for the last level caused by the new converted masters that have only one worker as a children
Conclusion • FTH-B&B: Application level Fault tolerant algorithm • Several FT-MW-based B&Bs are launched hierarchically • 3-phase communication mechanism (between a master, its children, and its grand-children) • Distribute, store, and recover work units in case of failures • Minimizing redundant work • Efficiency = 98% • 6,36 times more efficient than without using 3-Phase mechanism • 3 strategies to maintain the hierarchy • SCA, ME, and BH • BH has proved its efficiency in terms of balancing the hierarchy • Distributed checkpointing mechanism • Several checkpointing levels
Perspectives • Take into account best effort exploit the maximum number of computing resources • Improve the realism of FTH-B&B use a realistic model of failures based on real statistics of grids