Download
1 / 17
250 likes | 465 Views
PRISMA. PRISMA – A Formation Flying Project on the Launch Pad. Swedish Space Corporation Hans Hellman Staffan Persson Bengt Larsson. The background. FORMATION FLYING AND RENDEZVOUS TECHNOLOGY. Formation Flying typical application: Large apertures and antennas for science missions.

E N D
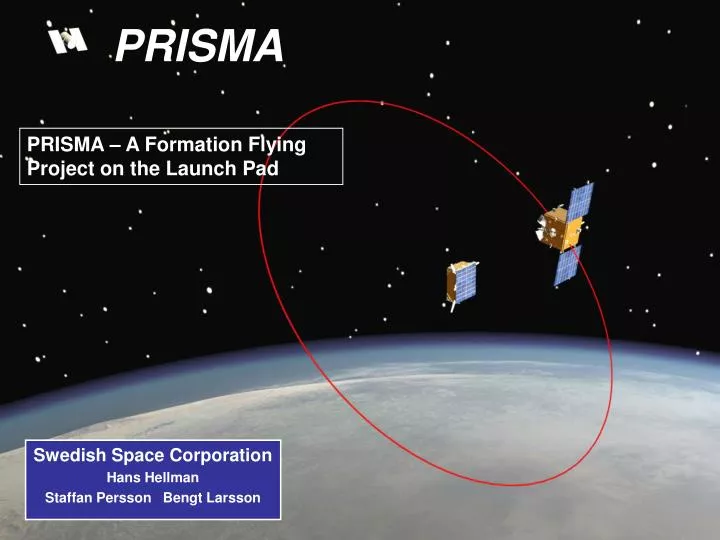
PRISMA PRISMA – A Formation Flying Project on the Launch Pad Swedish Space Corporation Hans Hellman Staffan Persson Bengt Larsson
The background FORMATION FLYING AND RENDEZVOUS TECHNOLOGY Formation Flying typical application: Large apertures and antennas for science missions Rendezvous technology typical application: In Orbit Inspection & Servicing MISSION OBJECTIVES: ”Demonstrate manoeuvering techniques and sensor and motor technology for Formation Flying and Rendezvous”
Intersatellite link Ground link Mango 150 kg 400 W 6 DOF control 120 m/s dV The satellites Tango 40 kg 100 W 3 DOF ACS (magnetic) ”Payload” GPS FFRF VBS cameras ”Payload” GPS FFRF LEDs
Mission overview • Shared launch on Dnepr • Two S/C – Mango and Tango • clamped during launch • SSO orbit 700 km, dawn-dusk • Sequence of experiments • GNC manoeuvers • Sensors • Propulsion • <1 year mission time • Operations from SSC / Kiruna
The project prime partners Prime, mission and system design GNC and OBSW AIV and Operations GPS system and navigation SW FFRF navigation instrument Vision Based Sensor HPGP motor system MEMS microthruster system
PRIMAY OBJECTIVE 1Autonomous Formation Flying (GPS or FFRF) • T-periodic orbits • Orbit acquisition • Fuel optimization • Collision / evaporation • avoidance
PRIMAY OBJECTIVE 2Autonomous Rendezvous (VBS sensor) • Target search/find • Orbit alignment • Autonomous RVD • 100 km to 10 m
PRIMAY OBJECTIVE 3Proximity Operations (VBS or GPS) • Forced motion between hold points • GPS or VBS
Three (!) Propulsion systems Experimental propulsion: HPGPTwo 1N thrusters directed to COG Experimental propulsion: MEMS MicropropulsionTwo thrusters pods Nominal propulsion:HydrazineSix 1N thrusters directed to COG
OnBoard S/W (SSC) System Failure Detection Recovery GNC S/W (SSC) SATLAB Enviromnent Mango Processor DLR Nav S/W DLR Exp S/W CAN bus Power Basic S/W CNES Exp S/W SSC Exp S/W Optional TM/TC SATLAB Simulator Thermal Tango Processor Serial I/F CAN bus P/F Unit Simulators Ground link RAMSES RAMSES network The Software validation Model-based development Matlab / Simulink AUTOCODING S/W validation Scenarios simulations Operational procedures
MAIN CAN Bus ASMMRTU ASMMRTU ACC PUSIM (ACC) (MTQ) ASMMRTU GRWRTU MM PUSIM SatSim (MM) (RW) ASMMRTU GPTRTU HTH PUSIM SS PUSIM (SS) (HTH) Mango GRWRTU ARS PUSIM (ARS) S/C TARGET CAN Bus Core Board ST/VBS TM/TC FEE Serial PUSIM (TM/TC) RF GPS SAS PCDU ASERRTU ASERRTU Serial PUSIM (TM/TC) (FFRF) ASMMRTU ASMMRTU ISL MM PUSIM (MM) (MTQ) Spirent 7000 GSS ASMMRTU SS PUSIM (SS) Tango RF ASERRTU GPS S/C (TM/TC) ASERRTU Serial PUSIM PCDU (FFRF) RAMSES Network RAMSES Hardware in the Loop testing
Environmental test – Solar Sim + TVC 1:st time with two S/C simultaneously in Intespace chamber
Environmental test– Mass prop + Vib Tango mounted in launch config
Environmental test – EMC • Test set-up with S/C separated 1 m • Simulatanous RF systems: • TM/TC (two S-band) • FFRF (two S-band • ISL (one UHF) • GPS (one L-band)
Shared launch on Dnepr LAUNCH: JUNE 15, 14:42:16 UTC
PRISMA is first to demonstrate • Autonomous Formation Flying • Autonomous RVD & Proximity Operations • New vision based rendezvous sensor • Test flight of FFRF position sensor • Green propellant propulsion • MEMS micropropulsion …..paving way for coming multi-satellite missions….. well, almost…