Download
1 / 1
10 likes | 109 Views
b o. b i. a o. a i. c i. c o. d o. d i. R. R. a o. b o. c o. d o. a o. b o. c o. d o. 5+20. 15+20. 20+20. ½. ½. Heuristic cost from a to Goal. Cost to a. ∞. R. R. a o. b o. c o. d o. a o. b o. c o. d o. 5+20. 15+20. 20+20.

E N D
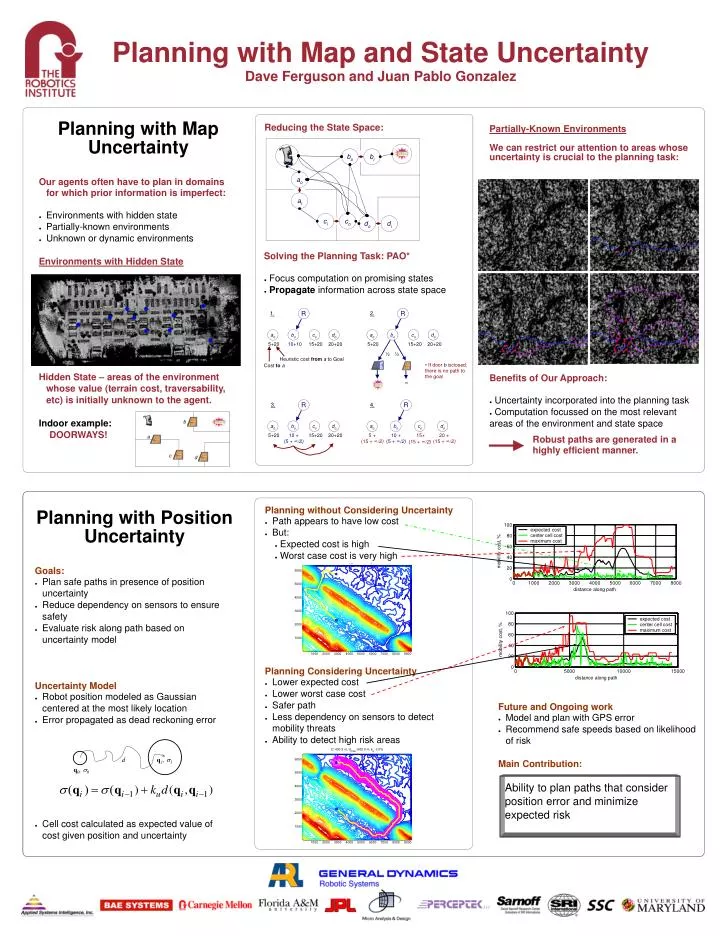
bo bi ao ai ci co do di R R ao bo co do ao bo co do 5+20 15+20 20+20 ½ ½ Heuristic cost froma to Goal Cost to a ∞ R R ao bo co do ao bo co do 5+20 15+20 20+20 Planning with Map and State Uncertainty Dave Ferguson and Juan Pablo Gonzalez Planning with Map Uncertainty Reducing the State Space: Partially-Known Environments We can restrict our attention to areas whose uncertainty is crucial to the planning task: Our agents often have to plan in domains for which prior information is imperfect: • Environments with hidden state • Partially-known environments • Unknown or dynamic environments Environments with Hidden State Hidden State – areas of the environment whose value (terrain cost, traversability, etc) is initially unknown to the agent. Indoor example: DOORWAYS! Solving the Planning Task: PAO* • Focus computation on promising states • Propagate information across state space 1. 2. 5+20 10+10 15+20 20+20 • If door bisclosed, there is no path to the goal Benefits of Our Approach: • Uncertainty incorporated into the planning task • Computation focussed on the most relevant areas of the environment and state space 3. 4. b 15+ (15 + ∞/2) 10 + (5 + ∞/2) 5 + (15 + ∞/2) 10 + (5 + ∞/2) 20 + (15 + ∞/2) a Robust paths are generated in a highly efficient manner. c d Planning without Considering Uncertainty • Path appears to have low cost • But: • Expected cost is high • Worst case cost is very high Planning Considering Uncertainty • Lower expected cost • Lower worst case cost • Safer path • Less dependency on sensors to detect mobility threats • Ability to detect high risk areas Planning with Position Uncertainty Goals: • Plan safe paths in presence of position uncertainty • Reduce dependency on sensors to ensure safety • Evaluate risk along path based on uncertainty model Uncertainty Model • Robot position modeled as Gaussian centered at the most likely location • Error propagated as dead reckoning error • Cell cost calculated as expected value of cost given position and uncertainty Future and Ongoing work • Model and plan with GPS error • Recommend safe speeds based on likelihood of risk Main Contribution: d q1, s1 q0, s0 Ability to plan paths that consider position error and minimize expected risk