Download
1 / 20
200 likes | 309 Views
Architecture for Autonomous Assembly. Reid Simmons Robotics Institute Carnegie Mellon University. Prior Work: Multi-Robot Assembly. Heterogeneous Coordinated Sliding Autonomy. Overall Approach. Utilize our previous work in robot autonomy Multi-layered software architecture

E N D
Architecture for Autonomous Assembly Reid SimmonsRobotics InstituteCarnegie Mellon University Architecture for Autonomous Assembly
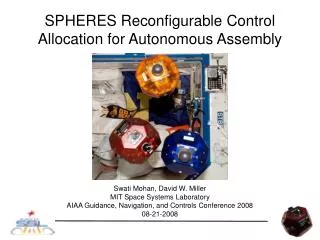
Prior Work: Multi-Robot Assembly • Heterogeneous • Coordinated • Sliding Autonomy Architecture for Autonomous Assembly
Overall Approach • Utilize our previous work in robot autonomy • Multi-layered software architecture • Hierarchical, task-level description of assembly • Robust, low-level behaviors • Distributed visual servoing • Force sensing • Exception detection and recovery Architecture for Autonomous Assembly
Planning Executive Behavioral Control Architectural Framework • Three-Tiered Architecture • Deals with goals and resource interactions • Reactive & Deliberative • Modular • Control loops at multiplelevels of abstraction • Task decomposition; Task synchronization; Monitoring; Exception handling • Deals with sensors and actuators Architecture for Autonomous Assembly
Synchronization / Coordination Planning Planning Planning Executive Executive Executive Granulatity Behavioral Control Behavioral Control Behavioral Control Syndicate: Multi-Robot Architecture Architecture for Autonomous Assembly
Advantages of Tiered Approach • Control loops at multiple levels of abstraction • Integrates reactive and deliberative mechanisms • Managed complexity • Representations tuned to specific objectives • “Plans as Advice” Architecture for Autonomous Assembly
Why Multi-Robot Architecture? • Modularity • Mobile manipulator agent • Perception agent • Coordinator agent • Efficiency • Promotes concurrency • Can spread over multiple computers • Reuse Existing Algorithms and Software Architecture for Autonomous Assembly
Configure Signals Arbiter Actions Action Behaviors Virtual Sensors Behavioral Layer • “Skill Manager” • Skills are concurrent behaviors, including perceptual behaviors • Dynamic creation of real-time feedback loops • Higher tier (executive) connects sensing and action modules and enables subsets of skills • Skills indicate status by passing signals back to executive • Enables flexible (and distributed) feedback control loops (e.g., visual servoing) Architecture for Autonomous Assembly
Mast Eye Mobile Manipulator Relative positions Tracking VisualServo End effector delta Images (via cameras) The World Manipulate environment (via arm) Distributed Visual Servoing • Mast Eye tracks fiducials • Uses ARTag software package to detect fiducials • Provides 6-DOF transform between fiducials • Mobile Manipulator uses information to plan how to achieve goal • Use data base describing positions of fiducials on objects • Behavioral layer enables dynamic, transparent inter-agent connections ArmControl Architecture for Autonomous Assembly
Distributed Visual Servoing • Fairly precise • millimeter resolution at one meter • Relatively fast • 3-4 Hz • Basically unchanged from Trestle code • Operates in relative frame • Poses of one object relative to another • Controller continually tries to reduce pose difference • Cameras do not need to be precisely calibrated with respect to base or arm Architecture for Autonomous Assembly
Executive Layer • Forms a Bridge Between Planning and Behaviors • Discrete vs. continuous control • Symbolic vs. numeric representations • Real-time considerations • Basic Roles • Decompose task into subtasks and dispatch tasks • Monitor execution for contingencies and opportunities • Reschedule tasks (or schedule new tasks) upon failure Architecture for Autonomous Assembly
TDL (Task Description Language) • High-Level Language Tailored to Task-Level Control • Extension of C++ with explicit syntax for task-level control constructs • Syntax for task decomposition, sequencing, monitoring, error handling • Compiles into pure C++ with calls to task management library • Requirements • Simple concepts should be expressible in simple terms • Do not preclude expression of complex control constructs • Natural integration with existing code Architecture for Autonomous Assembly
Task Trees – Deliberative • TDL Maintains and Coordinates Task Trees • Execution trace of hierarchical plans • Created dynamically at run time • Can be conditional and recursive • Temporal constraints (partially) order task execution • Planning and sensing treated as schedulable activities;Concurrent planning, sensing, and execution Architecture for Autonomous Assembly
Task Trees – Reactive • Task Trees Augmented with Reactive Elements • Task-specific execution monitors • Context-dependent, hierarchical exception handlers • Replan by Analyzing and Manipulating Task Trees • Terminate subtrees • Add new nodes and/or temporal constraints Architecture for Autonomous Assembly
Child link Serial Constraint Ace Task Decomposition Architecture for Autonomous Assembly
In the tree, this is the task name, but this is the actual function being executed A keyword that says this is not supposed to be a “leaf” in the task tree Reusing task with different parameters Tells the system to execute this task afterLoadPlugArmPose completes Wait until both tasks have completed before starting RoughArmMove Example TDL Code (somewhat simplified) Goal ClipInsertion ( ) { loadPlugArmPose : spawn ArmMove (loadPose); stowArmPose: spawn ArmMove (stowPose) WITH SERIAL loadPlugArmPose; roughBaseMove: spawn RoughBaseMove (roughBaseWaypoint) WITH SERIAL loadPlugArmPose; spawn RoughArmMove (roughArmWaypoint) WITH SERIAL roughBaseMove, SERIAL stowArmPose; … } Architecture for Autonomous Assembly
Monitoring & Error Recovery • Monitoring • Detect exceptions: significant differences between expectations and the state of the world • External Events (contingencies, opportunities) • Internal Events (sensors, actuators, computers) • Task Status (preconditions, progress, postconditions) • Diagnosis • Determine cause of exception • Error Recovery • Reconcile expectations and world state • Change world state (repair) • Alter expectations (replan) Architecture for Autonomous Assembly
Monitoring • Detect Completion of Tasks • Success conditions • Detect Failure Conditions and Lack of Progress • Need to Consider All Possible Situations • Important to try to cover all failure scenarios • Can handle hierarchically • Monitor for very general conditions as well as specific conditions Architecture for Autonomous Assembly
Executive ArmPlaceBeam Failure Spawn GraspBeam DockBeam Serialize Activate Behavioral Activate Failure VisualServo LostBeam Failure Recovery Architecture for Autonomous Assembly
What About the Planning Layer? • Planning layer creates task trees online • Based on knowledge of the system • Example: New task to be done. Planner knows which robots are available/capable to achieve it.Spawn the task on the desired robot. • Our tasks are straightforward • Number and type of robots is known • We hard-code our own task tree • One super-task spawns the main tree Architecture for Autonomous Assembly