Download

1 / 10
100 likes | 303 Views
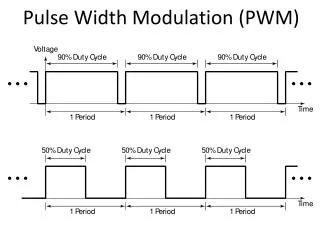
PWM. PTPER: 代表 PWM 的週期暫存器 PTSIDL: 0 = 繼續動作 1 = 閒置模式 PDC1~3: 設定 PWM 的責任週期 PTMR: PWM 內部計數值 PTCKPS: 設定除頻的數值 00 = 1 01 = 4 10 = 16 11 = 64. PWM 的四種模式 PTMOD<1,0> 00 = Free run mode. 01 = Signal-Event Mode 10 = Up/Down Counting Mode

E N D
PTPER:代表 PWM 的週期暫存器 PTSIDL: 0 = 繼續動作 1 = 閒置模式 PDC1~3:設定PWM的責任週期 PTMR:PWM內部計數值 PTCKPS:設定除頻的數值 00=1 01=4 10=16 11=64
PWM的四種模式 PTMOD<1,0>00 = Free run mode. 01 = Signal-Event Mode 10 = Up/Down Counting Mode 11 = Up/Down Counting Mode with Interrupt for double PWM updates PWMCON1 register PMOD3~PMOD1 1 = 獨立輸出 0 = 互補輸出 PEN3H~PEN1L 1 = 作PWM的I/O 0 = 作一般I/O用途 OVDCON Register POVD3H~POVD1L 1 = PWM輸出 0 = PWM無輸出,但會對應到POUT POUT3H~POUT1L(POVD為0時才會進入判斷) 1 = 輸出High 0 = 輸出Low
#include <p30F4011.h> //呼叫p30F3011(IC)指令巨集 _FWDT(WDT_OFF); void PWM_Initial(void) { PTPER = 1250; //PWM = (20MHz / 16 / 1250) = 1 kHz IEC2bits.PWMIE = 0; //Disable PWM Interrupt 禁止PWM中斷 PTCON = 0xA008; // 0b 1010 0000 0000 1000 PWMCON1 = 0x0777; // 0b 0000 0111 0111 0111 PDC1 = 1250; //設定duty cycle的大小 100%為PTPER2倍=2500 OVDCON= 0x0100; //設定PWM的輸出腳位 IPC9bits.PWMIP = 6;//優先權 } int main(void) { PWM_Initial(); while(1); }
請設計 PWM1=30%,頻率=2 KHz PWM2=60% PWM3=90% PWM3請利用互補輸出,其他則利用獨立輸出即可。 練習
原因是在初始化的时候,PDCx为0,而工作在single event的模式只能进一次中断,所以ISR里面设置的PDCx没有起作用,除非PTEN再置位一次。 PWM 的時脈可配置為 4 種不同的工作模式: •自動運行模式 •單事件模式 •連續遞增/遞減計數模式 •帶雙更新中斷的連續遞增/遞減計數模式 通過 PTCON 時的 SFR 中的 PTMOD<1 時 00 分>位可選擇這 4 種模式。 遞增/遞減計數模式支持產生中心對齊的脈寬調製器。單事件模式使 PWM 的模塊可支持某些電子換相電機(流腦)的脈衝控制。PWM 的時 基產生的中斷信號取決於 PTCON 時的 SFR 中的模式選擇位 (PTMOD<1:0>)和後分頻比位(PTOPS<3:0>)。