Download
1 / 30
310 likes | 475 Views
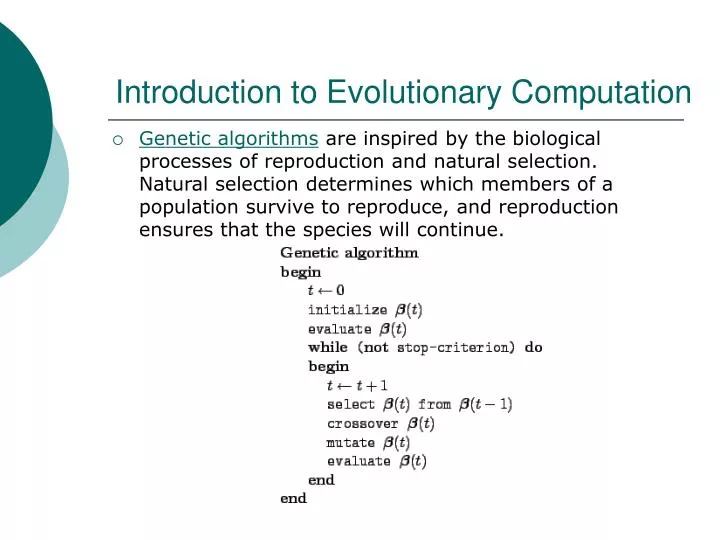
Introduction to Evolutionary Computation. Genetic algorithms are inspired by the biological processes of reproduction and natural selection. Natural selection determines which members of a population survive to reproduce, and reproduction ensures that the species will continue.

E N D
Introduction to Evolutionary Computation • Genetic algorithms are inspired by the biological processes of reproduction and natural selection. Natural selection determines which members of a population survive to reproduce, and reproduction ensures that the species will continue.
Introduction to Evolutionary Computation(Applications) • Aircraft Design, • Routing in Communications Networks, • Game Playing (Checkers [Fogel]) • Robotics, • Air Traffic Control, • Design, • Scheduling, • Machine Learning, • Pattern Recognition,
Introduction to Evolutionary Computation(Applications cont.) • Job Shop Scheduling, • VLSI Circuit Layout, Market Forecasting, • Design of Filters and Barriers, • Data-Mining, • User-Mining, • Resource Allocation, • Path Planning, • Etc.
Evolutionary Databases Optimization Evolutionary splitting in R-Trees for Spatial Databases Evolutionary Dynamic Clustering for Spatial Databases Evolutionary Optimization in Distributed Databases
Structure of R-Trees • The Minimum Bounding Rectangle (MBR) of the object is stored in R-Tree • The leafs: (PO,MBR(PO)) • The internal nodes: (PC, MBR(PC)) • Parameters: • M – the maximum number of entries • m – the minimum number of entries within a node
Evolutionary node splitting in R-Trees • Generalization of the node splitting • Minimization of the area and the overlapping of MBRs (Minimum Bounding Rectangle)
Evolutionary splitting in R-Trees Algorithm (ESRA) • The M+1 objects that has to be distributed to MBRs will be denoted by 1, 2, .. M, M+1. • A maximum of [M/m] MBRs • A potential solution of the problem (a chromosome) is a string of constant length { , , ..., }, where the gene indicates to which MBR the object i belongs. • Fitness function: • Generaliation:
The fitness function is to be minimized; the fitness value obtained with the R-Tree algorithm is well - determined, while the fitness value for ESRA is considered to be the average value obtained after 100 executions of it; the minimum usage of an R-Tree node is m=16;
Evolutionary Dynamic Clustering for Spatial Databases Virgo - cluster of galaxies
Evolutionary Dynamic Clustering for Spatial Databases • The proposed algorithm is optimizing the clusters’ centers and is determining their number • The population contains the clusters prototypes • The quality of a chromosome is computed by taking into account the distances between prototypes and all the other objects that need to be grouped • The very close individuals are merged, and this way the population size decreases • The final population contains only the clusters’ centers
Evolutionary Dynamic Clustering for Spatial Databases • P – prototype • n – number of total objects • Xi – the i object
Existing clusters Quadratic Cost R-Tree Algorithm R*-Tree Algorithm ESRA EDCA 3 63156 63156 22672 (3 detected clusters) 22672 (3 detected clusters) 3 58118 58118 23919 (3 detected clusters) 22427 (4 detected clusters) 4 89736 89736 45151 (4 detected clusters) 45151 (4 detected clusters) 4 87943 87943 31459 (4 detected clusters) 28166 (5 detected clusters) 5 112485 112485 43111 (5 detected clusters) 43111 (5 detected clusters) 5 61846 61846 29684 (5 detected clusters) 29684 (5 detected clusters) 6 113598 127792 59896 (5 detected clusters) 42425 (6 detected clusters) 6 105338 105338 65716 (5 detected clusters) 48245 (6 detected clusters) The quality of the solutions obtained after using the Quadratic Cost Algorithm, R*-Tree, ESRA and EDCA for 8 sets of grouped spatial objects
Evolutionary Optimization in Distributed Databases • Design relies on the graph representation and system management improvement by use of intelligent agents • initial estimated cost that can be assigned by the system designer to an edge; this cost is estimated based on network transfer rate, data access time and computing power on a site • up-to-date computed costby agents performing statistic on queries frequency
Evolutionary Fragmentation and Allocation in DDBS • a potential solution for the problem (a chromosome) is a string of constant length { , ,…, }, where the value of the gene indicates to which node of the graph the group of tuples i belongs (n – number of nodes, s– the number of tuples’ groups x s
Experimental results The given graph and the new costs associated with the edges between nodes are given
Experimental results - contd • We compare the total cost of the requests with the initial fragmentation and distribution with the total cost of the requests after reallocation of tuples in graph. • For the given example, the total cost of the requests in the graph with the initial distribution is 38.5 mil., while the total cost of the requests after reallocation made by the proposed algorithm is 22.2 mil. (47.5% improvement)
Conclusions • Evolutionary technique for splitting R-Trees nodes for Spatial Databases • Evolutionary Dynamic Clustering for Spatial Databases • Evolutionary re-fragmentation and re-allocation within a distributed system
Adaptive Goal Guided Recombination (AGGX) • Two new features: • information sharing mechanism between the individuals of a population (each individual knows the value of the best individual obtained so far - the so called global best) • each individual has memory (each individual knows the value of its best related individual - the so called local best)
Adaptive Goal Guided Recombination (AGGX) • the control of the amount of relevant genetic information transferred from the global best and local best to the offspring • NoKept - the number of genes kept in the offspring • NoEdges - the total number of edges involved in the common sequences of the global and the local best • NoCrt -the number of the current generation • NoGen - the number of total generations of the algorithm • a randomly chosen sequence of one parent is always kept in the offspring (in order to increase the population diversity)
Evolutionary Approach of TSP • k cities • potential solution for the problem - a string of length k that contains a permutation of the set {1,…k} • Fitness function f to be minimized:
Experimental Results • Standard Genetic Algorithm (SGA) for: • TSP instance with 130 cities • TSP instance with 76 cities
Results obtained after 100 runs of SGA for TSP with 130 cities
Results obtained after 100 runs of SGA for TSP with 76 cities
The convergence process for SGA using OX and AGGX,for TSP with 130 cities.
The convergence process for SGA using OX and AGGX,for TSP with 76 cities.
Conclusions and future work • AGGX is based on two new features: • social behavior of individuals within a population • the memory of each individual AND • control of the amount of relevant genetic information transferredfrom the global best and local best to the offspring • a randomly chosen sequence of one parent is always kept in the offspring • a way to introduce diversity in the population will be pursued